GPTQ 原理以及完整证明¶
约 4164 个字 6 张图片 预计阅读时间 21 分钟

GPTQ 即使提出的时间相当早(2022),但目前仍然活跃在当前(2025)的 LLM 量化方法当中,可见其强大之处。本文将对 GPTQ 的原理进行深入理解,并且对论文中的公式进行完整的证明。原论文中许多公式和结论直接一笔带过,甚至没有说明,这给论文的阅读带来相当大的难度,本文可能是全网唯一对 GPTQ 进行完整证明的文章
- 论文:GPTQ: Accurate Post-Training Quantization for Generative Pre-trained Transformers
- 论文代码:https://github.com/IST-DASLab/gptq
- 社区代码:https://github.com/AutoGPTQ/AutoGPTQ
前身 OBS & OBQ¶
OBQ: Optimal Brain Quantization
OBS 是一种神经网络的裁剪方法,核心思路是:在二阶近似的条件下,寻找一些权重,将这些权重删除后对模型产生的误差最小,其简单的推导过程如下:
考虑训练到局部最小误差的网络,对于权重扰动\(\delta \mathbf w\)的 Loss 的二阶泰勒展开
\(E\)就是网络的输出,例如:对于一个线性层来说\(E=\mathbf{w}·\mathbf{x}\)
其中\(\mathbf{H}= \frac{\partial^2 E}{\partial \mathbf{w}^2}\)是网络输出对权重的 Hessian Matrix,基于网络已经收敛到局部最优的假设,泰勒一阶展开应该比较小,所以忽略第一项。并且由于权重扰动较小,所以也忽略更高阶的展开。我们需要获得最小的\(\delta E\)
此时对某个权重\(\mathbf{w}_q\)进行删除的操作表示为
将上式用向量\(\mathbf{w}\)表示
\(\mathbf{e}_q\)是权重空间\(\mathbf{w}\)中对于\(w_q\)位置的 one-hot 向量
基于以上约束,我们可以使用拉格朗日乘数法来解决该最优化问题
可以解得
这样我们就得到了一个\(\delta\mathbf{w}\)使得我们剪切了\(w_q\)并且调整了其他的权重使得 Loss 的变动最小
有了 OBS 的铺垫,OBQ 很快把这种方式推广到了量化当中,这其实很好理解:常用的量化则是把数值近似到一个接近的值, 而剪枝实际上可以看做把数值直接近似成0(某种意义上或许可以称作1bit或0bit量化),可以理解为一种特殊的量化
OBQ 将 OBS 扩展后的公式如下:
下标\(F\)代表当前剩余的所有未量化权重,\(\mathbf{H}_F\)则为对应的 Hessian Matrix
通过不断寻找影响最小的\(w_q\)进行量化,就能够得到最后的量化模型。在这个过程中我们每量化一个权重\(w_q\)就要更新当前未量化的权重,并重新计算未量化权重的 Hessian Matrix
GPTQ 算法¶
OBQ 算法在量化结果上表现不错,但是太慢了。OBQ 对 ResNet-50 进行量化需要一个小时,但由于其算法复杂度为\(O(d_{row}·d_{col}^3)\),在大模型上将花费几年的时间,所以 GPTQ 方法就是在 OBQ 的基础上进行加速,其改进点总结为以下三点:
-
取消贪心算法
在 OBQ 中,是逐个找影响最小的 q 来剪枝/量化,经过观察发现,其实随机的顺序效果也一样好(甚至在大模型上更好)。原算法对 W 进行优化时,逐行计算,每一行挑选q的顺序都是不一样的。在 GPTQ 中直接全部都采用固定顺序,使得复杂度从\(O(d_{row}·d_{col}^3)\)下降到\(O(\max (d_{row}·d_{col}^2, d_{col}^3))\)。对于一个\(d_{raw}=d_{col}=1024\)的矩阵来说,复杂度将减少 1000 倍,即 3 个数量级
-
批处理
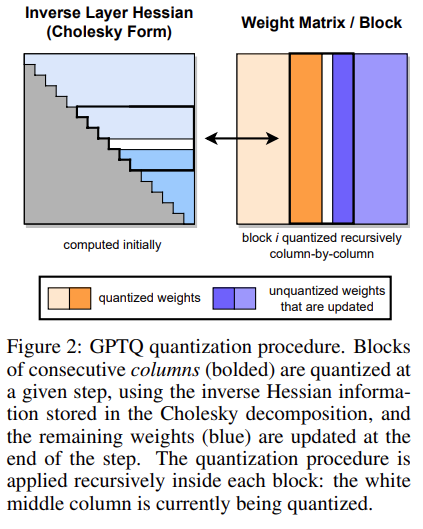
OBQ 算法在对单个权重量化完成后,会对所有未量化的权重进行更新来进行补偿。这样的方式是具有较低的 compute-memory-ratio 的,尤其是当未量化的权重比较多的情况。由于同一个特征矩阵 W 不同列间的权重更新是不会互相影响的,GPTQ 提出了批处理的方法,一次处理多个列(例如 128 列)。在一个批次内,仍然是逐列地进行量化,但是暂时不更新批次外的未量化权重,在完成列内的量化后,统一更新未量化的权重,这将大幅提升 compute-memory-ratio
Compute-memory-ratio: 程序执行过程中,FLOPs 计算量与在 global memory 获取的数据量之比,单位为 FLOP/Byte,也称作计算强度
-
数值稳定性
在 OBQ 计算\(\mathbf{H}^{-1}\)的方式是利用 Gaussian elimination 迭代计算的,这样能避免求逆的三次复杂度操作
\[ \mathbf{H}^{-1}_{-q} = (\mathbf{H}^{-1}-\frac{1}{[\mathbf{H}^{-1}]_{q,q}}\mathbf{H}^{-1}_{:,q}\mathbf{H}^{-1}_{q,:})_{-q} \]下标\(-q\)代表移除矩阵的第\(q\)行和第\(q\)列
这个过程会产生数值不稳定的问题,对于小模型可以通过在矩阵对角元素上加一个小量\(\lambda\)来解决,但对于大模型该方法将仍不奏效。得益于每一行都采用相同的量化顺序,所以他们都共享相同的\(\mathbf{H}^{-1}\),GPTQ 采用了提前计算好所有需要的信息,避免该迭代过程。计算这些信息的方法使用的是用 Cholesky decomposition 的形式等价原来的计算结果
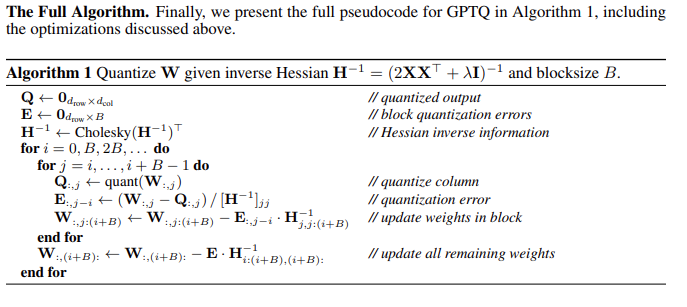
GPTQ 完整的算法图如下
实验结果¶
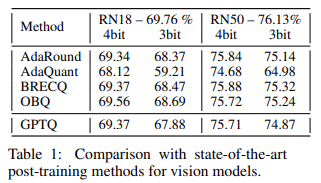
Quantizing Small Models¶
论文测试了 GPTQ 在 ResNet18 & ResNet50 上的量化效果,可以看到在 4-bit 量化中,GPTQ 几乎和最好的方法打平;在 3-bit 量化中略逊色于最好的方法。在量化时间上 GPTQ 只需要 < 1 min 的时间,而 OBQ 方法则需要 1 小时,这是 GPTQ 的优势
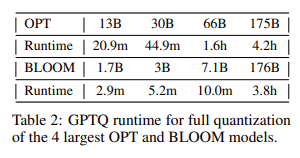
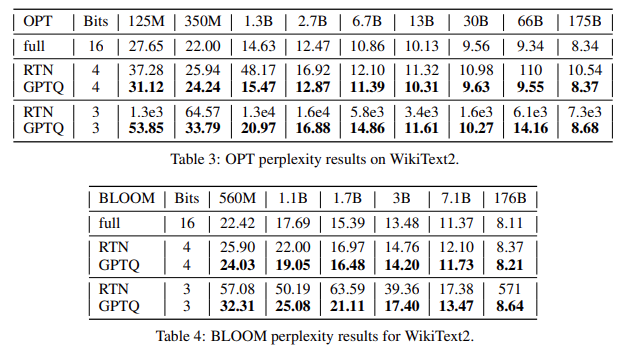
Quantizing Big Models¶
GPTQ 算法在量化 1-3B 参数量的模型只需要几十分钟,对于 175B 参数量的模型则需要 3-4 个小时 (on single A100 GPU)
论文使用 RTN 作为 baseline 进行比较,是全面占优的。在越大的模型上,其量化结果越好
Math in GPTQ¶
Lagrange Multiplier¶
From wiki
the method of Lagrange multipliers is a strategy for finding the local maxima and minima of a function subject to equation constraints
其中函数和约束记为
bilibili 这个视频很好地讲述了拉格朗日乘数法的几何理解:
极值点的必要但不充分条件为:1. 满足约束函数条件;2. 原函数梯度与约束的梯度方向相同
这两个条件可以用一个 lagrange function 并对其变量求偏导来表示
利用拉格朗日乘数法就能够轻松推导出 GPTQ 论文中的最优值结论
Schur Complement¶
舒尔补并没有直接在 GPTQ 的论文当中出现,不过在询问各个 ChatGPT 老师的过程中,schur complement 会频繁出现。这里简单列出其形式和重要特性:
对于一个分块矩阵\(M\),其中\(A\)必须是可逆的(如果\(D\)是可逆的,也可以定义关于\(D\)的 schur complement)
则矩阵\(M\)关于块\(A\)的 schur complement 为
Schur 补最著名的应用是给出分块矩阵\(M\)的逆的显式表达式(当\(A\)和\(S\)均可逆时)
为什么重要? 这个公式将大规模矩阵\(M\)的求逆问题分解为对较小的子块\(A\)和\(S\)的求逆问题,以及一些矩阵乘法。如果\(A\)和\(S\)的逆更容易计算(例如,它们是稀疏的、对角化的或已经预先计算好的),这可以显著降低计算复杂度
Inverse of\(H_F\)¶
在 GPTQ 当中,当我们量化好了某个权重时,就会在 Hessian 矩阵中剔除该权重的位置相关的行和列,然后重新求解子 Hessian 矩阵的逆。在论文当中使用迭代公式求解这个过程
而这个式子,是不是很像上面提到的 schur complement?但实际上二者的联系并没有看上去那样直接。这个证明过程需要使用到 schur complement
From DeepSeek(不得不感叹现在的 AI 真的很强,直接把整个证明过程写得非常清楚)
将原矩阵进行重新排列
\[ \mathbf{H} = \begin{bmatrix} \mathbf{H}_{-q} & \mathbf{c} \\ \mathbf{d}^\top & e \end{bmatrix} \]其中:
- \(\mathbf{H}_{-q}\)是移除第\(q\)行和第\(q\)列后的\((n-1) \times (n-1)\)子矩阵(即我们要求的逆的部分)。
- \(\mathbf{c}\)是\(\mathbf{H}\)的第\(q\)列,但移除第\(q\)行元素(一个\((n-1) \times 1\)列向量)。
- \(\mathbf{d}^\top\)是\(\mathbf{H}\)的第\(q\)行,但移除第\(q\)列元素(一个\(1 \times (n-1)\)行向量)。
- \(e = \mathbf{H}_{q,q}\)是一个标量。
根据 schur complement 的定义,我们可以得到\(H^{-1}\)的表达式
\[ \mathbf{H}^{-1} = \begin{bmatrix} \mathbf{H}_{-q}^{-1} + \frac{1}{\delta} \mathbf{H}_{-q}^{-1} \mathbf{c} \mathbf{d}^\top \mathbf{H}_{-q}^{-1} & -\frac{1}{\delta} \mathbf{H}_{-q}^{-1} \mathbf{c} \\ -\frac{1}{\delta} \mathbf{d}^\top \mathbf{H}_{-q}^{-1} & \frac{1}{\delta} \end{bmatrix} \]其中 schur complement\(\delta = e - \mathbf{d}^\top \mathbf{H}_{-q}^{-1} \mathbf{c}\)
由于我们已经事先求得了\(H^{-1}\),所以可以根据上述表达式计算得到\(H_{-q}^{-1}\)。这其中还需要花费一些功夫,我们把\(H^{-1}\)也进行分块
\[ \mathbf{H}^{-1} = \begin{bmatrix} \mathbf{A} & \mathbf{m} \\ \mathbf{n}^\top & k \end{bmatrix} \]从这个分块形式中,我们可以识别:
- \(\mathbf{H}^{-1}\)的右下角元素是\([\mathbf{H}^{-1}]_{q,q} = \frac{1}{\delta}\),因此\(\delta = \frac{1}{[\mathbf{H}^{-1}]_{q,q}}\)
- \(\mathbf{H}^{-1}\)的第\(q\)列(移除第\(q\)行元素,可记为\((\mathbf{H}^{-1}_{:,q})_{-q}\))是\(\mathbf{m} = -\frac{1}{\delta} \mathbf{H}_{-q}^{-1} \mathbf{c}\),
- \(\mathbf{H}^{-1}\)的第\(q\)行(移除第\(q\)列元素,可记为\((\mathbf{H}^{-1}_{q,:})_{-q}\))是\(\mathbf{n}^\top = -\frac{1}{\delta} \mathbf{d}^\top \mathbf{H}_{-q}^{-1}\)
我们需要求解\(\mathbf{H}_{-q}^{-1}\),其存在于\(A\)中,我们已知\(\mathbf{A} = (\mathbf{H}^{-1})_{-q}\),所以通过一些简单整理就能够得到\(\mathbf{H}_{-q}^{-1}\)。我们先把\(\mathbf{A}\)的式子展开:
\[ \mathbf{A} = (\mathbf{H}^{-1})_{-q} = \mathbf{H}_{-q}^{-1} + \frac{1}{\delta} \mathbf{H}_{-q}^{-1} \mathbf{c} \mathbf{d}^\top \mathbf{H}_{-q}^{-1} \]利用已知的\(\mathbf{m}\)和\(\mathbf{n}^\top\),我们可以计算得到上面的\(\mathbf{c}, \mathbf{d}^\top\):
\[ \mathbf{H}_{-q}^{-1} \mathbf{c} = -\delta \mathbf{m}, \quad \mathbf{d}^\top \mathbf{H}_{-q}^{-1} = -\delta \mathbf{n}^\top \]代入表达式:
\[ (\mathbf{H}^{-1})_{-q} = \mathbf{H}_{-q}^{-1} + \frac{1}{\delta} (-\delta \mathbf{m}) (-\delta \mathbf{n}^\top) = \mathbf{H}_{-q}^{-1} + \delta \mathbf{m} \mathbf{n}^\top \]得到
\[ \mathbf{H}_{-q}^{-1} = (\mathbf{H}^{-1})_{-q} - \delta \mathbf{m} \mathbf{n}^\top \]此时所有的量都是已知量,我们把\(\mathbf{m}, \mathbf{n}^\top, \delta\),全部换成\(\mathbf{H}^{-1}\)的表示方式就能得到 GPTQ 中给出的结论了
在此过程中,我们对矩阵\(H\)进行了重新排布,好消息是排布可以使用相似变换来完成,所以不影响以上证明的最终结论
移动操作的数学本质
- 将第\(q\)行/列移动到边界,等价于用排列矩阵\(\mathbf{P}\)对\(\mathbf{H}\)做相似变换:
$$
\widetilde{\mathbf{H}} = \mathbf{P} \mathbf{H} \mathbf{P}^\top
$$其中\(\mathbf{P}\)是置换矩阵(\(\mathbf{P}^{-1} = \mathbf{P}^\top\))。
- \(\widetilde{\mathbf{H}}\)的逆为:
$$
\widetilde{\mathbf{H}}^{-1} = \mathbf{P} \mathbf{H}^{-1} \mathbf{P}^\top
$$
- 关键点:\(\widetilde{\mathbf{H}}\)的左上角子矩阵\(\widetilde{\mathbf{H}}_{-n}\)就是原始\(\mathbf{H}_{-q}\)(仅行列顺序可能不同,但集合相同)。
Cholesky decomposition¶
From DeepSeek
Cholesky 分解是一种非常重要的矩阵分解方法,专门针对对称正定矩阵。它将一个对称正定矩阵
A分解为一个下三角矩阵L和其转置Lᵀ的乘积。数学表达:
A = L * Lᵀ其中:
A是一个n x n的 对称正定矩阵。L是一个n x n的 下三角矩阵(即主对角线以上的元素全为零)。Lᵀ是L的 转置,是一个上三角矩阵。为什么重要?优势是什么?
- 高效性: 与通用的 LU 分解相比,Cholesky 分解利用了矩阵的对称正定性,计算量大约只有 LU 分解的一半,并且所需的存储空间也更少(只需要存储
L矩阵,因为它包含了Lᵀ的信息)。这使得它在处理大规模对称正定系统时速度更快、内存占用更低。Cholesky 分解可以通过一种相对直接的算法计算,类似于高斯消元法,但利用了对称性来减少计算量。计算过程逐行/列进行- 数值稳定性: 对于对称正定矩阵,Cholesky 分解通常非常数值稳定,不需要进行主元(pivoting)。正定性保证了在计算过程中不会出现除零错误(因为对角线元素
lⱼⱼ的计算涉及开平方根,而aⱼⱼ - Σ...部分保证是正数)。- 正定性的检测: 在计算 Cholesky 分解的过程中,如果遇到试图对负数或零开平方根的情况(即
aⱼⱼ - Σ... <= 0),那么就可以立即断定原始矩阵A不是正定的。因此,Cholesky 分解算法本身也是一个检查矩阵是否正定的有效方法。- 矩阵求逆: 虽然直接求逆通常不推荐(效率低且可能引入数值误差),但如果需要对称正定矩阵
A的逆,可以通过 Cholesky 分解来实现:
A = L * LᵀA⁻¹ = (Lᵀ)⁻¹ * L⁻¹- 求三角矩阵的逆比求一般矩阵的逆高效得多。
Proof of GPTQ correctness¶
在 GPTQ 算法之中直接使用了 Cholesky 分解过后的上三角矩阵\(L^T\)来替代\(\mathbf{H}^{-1}\),在论文当中完全没证明其正确性,关键证明都是一句带过,所以给我带来很大困扰。事实上需要掌握以上的数学工具才能完全理解该过程
要证明 GPTQ 算法的正确性,需要几个额外的关键证明:
-
证明计算子 Hessian 逆等价于 Cholesky decomposition 子矩阵\(L_FL_F^T\)
\[ \mathbf{H}^{-1}_{-q} = (\mathbf{H}^{-1}-\frac{1}{[\mathbf{H}^{-1}]_{q,q}}\mathbf{H}^{-1}_{:,q}\mathbf{H}^{-1}_{q,:})_{-q}=L_{F}L_F^T \]在 GPTQ 的实际使用过程中\(q=0\),即永远按照顺序进行量化,我们就证明在\(q=0\)的情况下,二者是等价的。我们首先对\(\mathbf{H}^{-1}\)进行分解
\[ \mathbf{H}^{-1} = L L^T = \begin{bmatrix} l_{11} & 0 \\ l_{21} & L_{22} \end{bmatrix} \begin{bmatrix} l_{11} & l_{21}^T \\ 0 & L_{22}^T \end{bmatrix} = \begin{bmatrix} l_{11}^2 & l_{11} l_{21}^T \\ l_{11} l_{21} & l_{21} l_{21}^T + L_{22} L_{22}^T \end{bmatrix}. \]其中\(L_{22}\)就是上述提到的\(L_{F}\),即剩余的子矩阵,\(l_{21}\)是一个向量,\(l_{11}\)是一个标量。根据定义有
1.\([\mathbf{H}^{-1}]_{q,q}=l_{11}^2\)
2.\(\mathbf{H}^{-1}_{q,:}=[l_{11}, l_{21}]\)
3.\(\mathbf{H}^{-1}_{:,q}=[l_{11}, l_{21}]^T\)将上述表达式带入到迭代式中既可以求得
\[ \mathbf{H}^{-1}_{-q}== \begin{bmatrix} 0 & 0 \\ 0 & L_{22} L_{22}^T \end{bmatrix}_{-q}=L_{22} L_{22}^T \] -
证明使用\(L^T\)替代\(H^{-1}\)进行计算是等价的
这个证明过程也不难,因为在第一行二者只相差一个 scale\(L_{00}\),这个差异由一个除法进行了消除。具体来说 GPTQ 是为了计算权重的更新量,该式由之前推导得:
\[ \delta\mathbf{w}=-\frac{w_q-quant(w_q)}{[\mathbf{H}^{-1}]_{q,q}}(\mathbf{H})^{-1}_{:,q} \]由于 GPTQ 是顺序量化,所以这里\(q \equiv 0\),易证
\[ \frac{\mathbf{H}^{-1}_{:,0}}{[\mathbf{H}^{-1}]_{0,0}} = \frac{L_{:,0}}{[L]_{0,0}} \]
以上两个证明保证了 GPTQ 算法的正确性:
-
无需重复计算\(\mathbf{H}_F^{-1}\),可以直接使用 Cholesky decomposition 结果
-
无需使用\(\mathbf{H}^{-1}\),可直接使用 Cholesky decomposition 的上三角矩阵作为替代
总结¶
GPTQ 解决了大模型量化的耗时长的问题以及稳定性问题,在 4-bit 要求下能够保持良好的模型精度,并且对于千亿级别的模型,只需要几个小时就能完成量化。在实际使用中,可以先使用 GPTQ 快速地获得一个稳定的基线量化模型,并在此基础上进行精度优化。