Faster RCNN note
本文总结自知乎链接https://zhuanlan.zhihu.com/p/31426458
整体思路
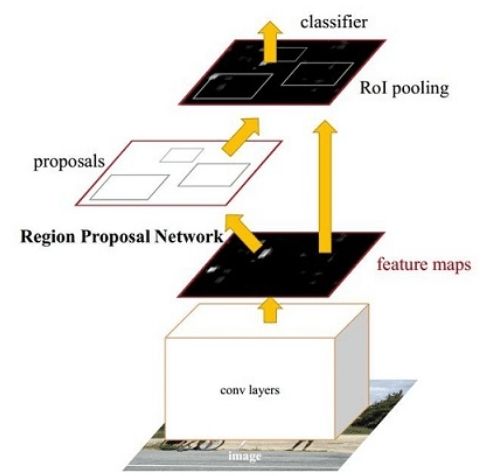
Faster RCNN其实可以分为4个主要内容:
Conv layers
Faster RCNN首先使用一组基础的conv+relu+pooling层提取image的feature maps。该feature maps被共享用于后续RPN层和全连接层。
Region Proposal Networks
该层通过softmax判断anchors属于positive或者negative,再利用bounding box regression修正anchors获得精确的proposals。
Roi Pooling
该层收集输入的feature maps和proposals,综合这些信息后提取proposal feature maps,送入后续全连接层判定目标类别。
Classification
利用proposal feature maps计算proposal的类别,同时再次bounding box regression获得检测框最终的精确位置。
Conv Layers
Conv layers部分共有13个conv层,13个relu层,4个pooling层
- 所有的conv层都是:kernel_size=3,pad=1,stride=1
- 所有的pooling层都是:kernel_size=2,pad=0,stride=2
那么,一个MxN大小的矩阵经过Conv layers固定变为(M/16)x(N/16)
Region Proposal Networks
Anchors
提到RPN网络,就不能不说anchors。所谓anchors,实际上就是一组由程序生成的矩形。直接运行作者demo中的generate_anchors.py可以得到以下输出 (不要被这些数字吓到了,没有具体意义)
[[ -84. -40. 99. 55.]
[-176. -88. 191. 103.]
[-360. -184. 375. 199.]
[ -56. -56. 71. 71.]
[-120. -120. 135. 135.]
[-248. -248. 263. 263.]
[ -36. -80. 51. 95.]
[ -80. -168. 95. 183.]
[-168. -344. 183. 359.]]每行有4个值,代表了矩形左上角和右下角两个点$(x_1, y_1, x_2, y_2)$
一共9个矩形,来组于不同长宽比和不同大小的组合:长宽比有3种,1:1, 1:2, 2:1
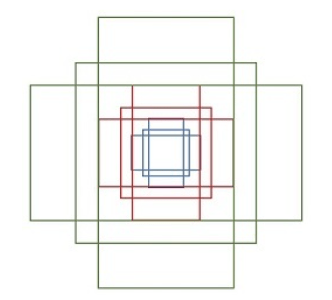
那么这9个anchors是做什么的呢?借用Faster RCNN论文中的原图,如图7,遍历Conv layers计算获得的feature maps,为每一个点都配备这9种anchors作为初始的检测框
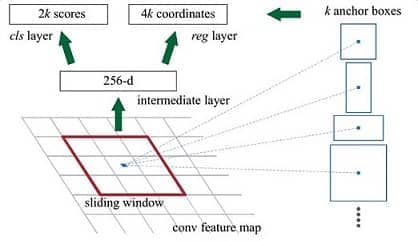
简单解释一下上图:
conv feature map中,每一个点都是256-dimensions
intermidiate layer为 3x3 卷积,out put dimension为256,得到新的conv feature map
在新的conv feature map上,我们对每一个点预先设定的k个anchor做bounding box regression和softmax分类(positive, nagetive两类),分别对应4k coordinates,2k scores
换句话说,就是把某一anchor区域中的特征向量拿去做prediction,预测内容为该点的分类和该点/anchor对应的bounding box参数
由于anchor数量是巨大的,训练程序会在合适的anchors中随机选取128个postive anchors+128个negative anchors进行训练
Bounding box regression原理
怎样在anchor的基础上回归得到ground truth标签呢?
给定anchor $(A_x, A_y, A_w, A_h)$ ,给定ground truth $(G_x, G_y, G_w, G_h)$
我们只要去预测中心点的位置偏移,以及矩形长宽的缩放即可
个人觉得这样的回归方法有点麻烦,这样来看CenterNet中的bounding box回归是相当直接的
Proposal
- 生成anchors,得到对应的confidence score & bounding box regression,形成最初的proposal
- 对所有anchors,根据positive score进行排序,取前6000个anchor proposals
- 去除较小和超出边界的proposal
- NMS
ROI Pooling
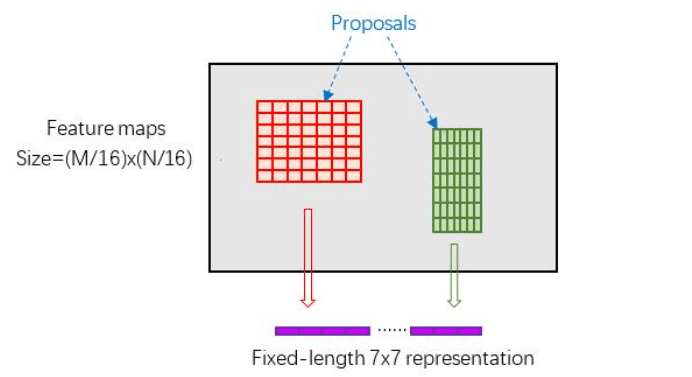
Rol pooling层有2个输入:
- 原始feature maps
- RPN输出的proposals
这一个Pooling操作还要有一个功能,就是需要处理不同大小的proposal (kernel)。经典的pooing操作是使用相同大小的kernel,这里我们要预先对 proposal (region of interest) 进行统一的分割,使得pooling结果是相同的表示(如下图)
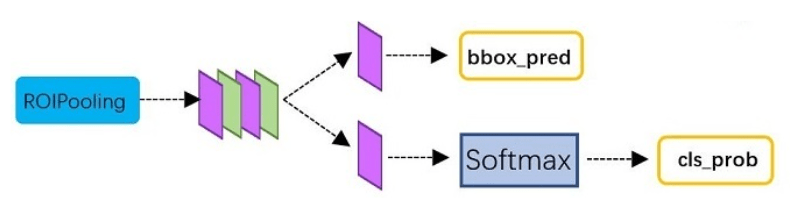
Classification
Classification部分利用已经获得的proposal feature maps,通过full connect层与softmax计算每个proposal具体属于那个类别(如人,车,电视等),输出cls_prob概率向量;同时再次利用bounding box regression获得每个proposal的位置偏移量bbox_pred,用于回归更加精确的目标检测框
Training
Faster R-CNN的训练,是在已经训练好的model(如VGG,ZF)的基础上继续进行训练,实际训练过程为以下:
- 在已经训练好的model(e.g. VGG),训练RPN
- 用步骤1中得到的RPN提出proposal
- 用提出的Proposal训练Fast RCNN
- 用步骤4中训练好的Fast RCNN继续训练RPN
- 重复2
- 重复3
可以看出这是一种类似迭代的过程,但只循环了2次,文章提出更多的循环并不会带来相应的提升


