CG-SSD
这篇是辅助网络最近的一个工作,对于小目标的效果提升非常好!简单整理一下其中的辅助模块 CGAM (corner-guided auxiliary module)
Introduction
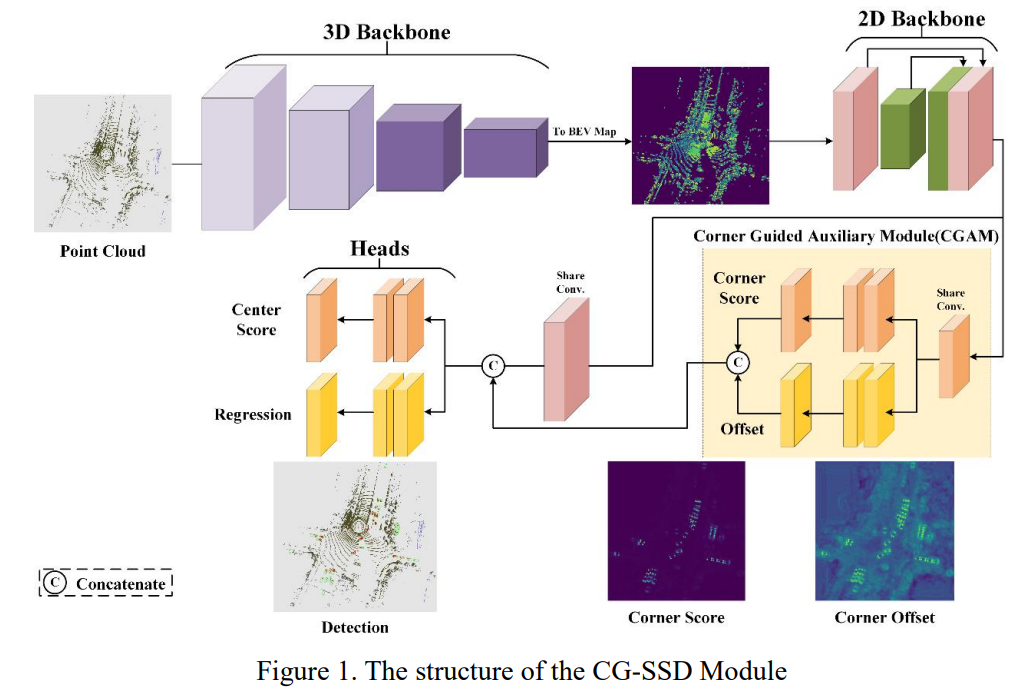
CGAM 的核心思想就是使用 BEV map 去做两个辅助任务:
- corner classification
- corner offset predicton
然后将预测得到的 feature map concat 到原来的 BEV map,然后再去做 box prediction。这样的 CGAM 可以当作一个 plug-in 去帮助 BEV-based 网络提点
Corner Selection
为了让 corner 带有更多的信息,论文还把 corner 分成了四个类别:1. Visible; 2. Partly Visible L; 3. Partly Visble W; 4. Invisible
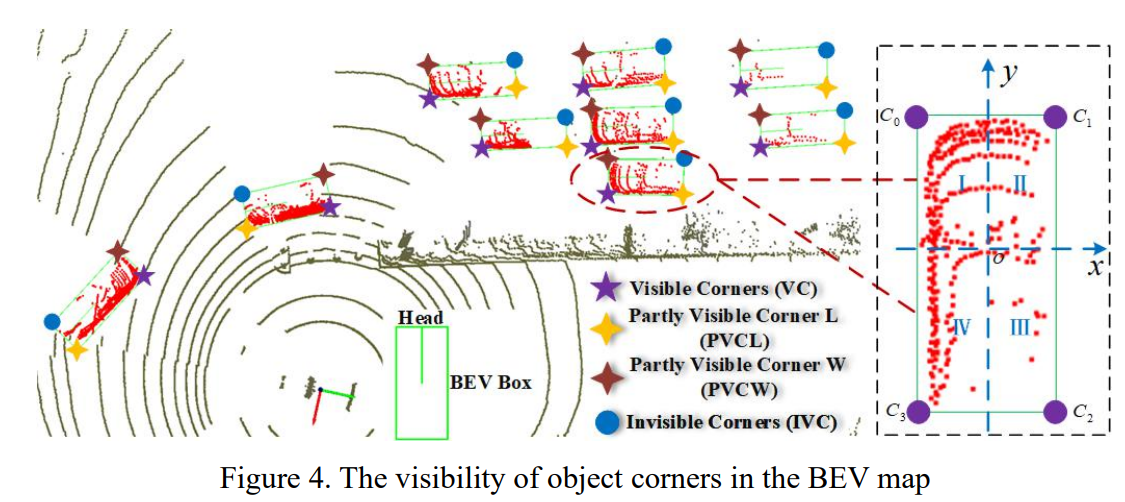
简单来讲,角的类别是其所在象限的点云数量决定的:点云最多的就是 visible corner,最少的就是 invisible corner,不多不少的就是 partly visible corners
在做 corner classification 的时候不会去识别所有的角,而是去识别后三类角,这样效果最好。Corner Selection 就是把后三类角给找出来,并且为了鲁棒性,分两种情况讨论了如何衡量象限内的点云数量:
- 如果物体内的点很少,只有两个象限有点云,就直接看单个象限内点云的个数
- 如果物体内的点云多,考虑连续三个象限内的点云
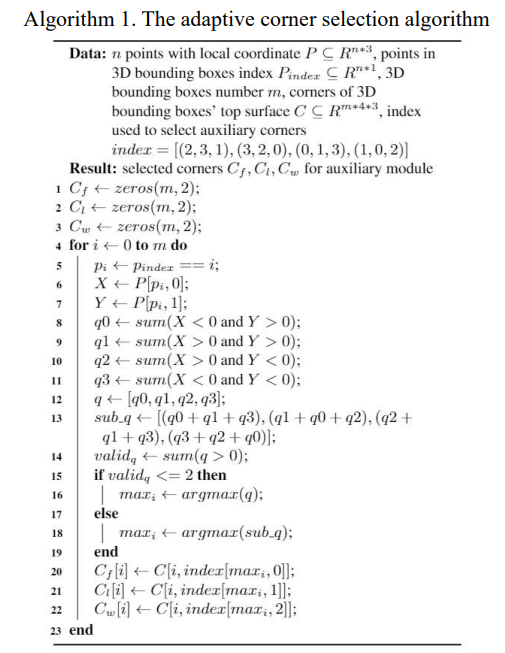
论文中的详细算法如下
Archetecture
CGAM 的结构论文也画的非常清晰
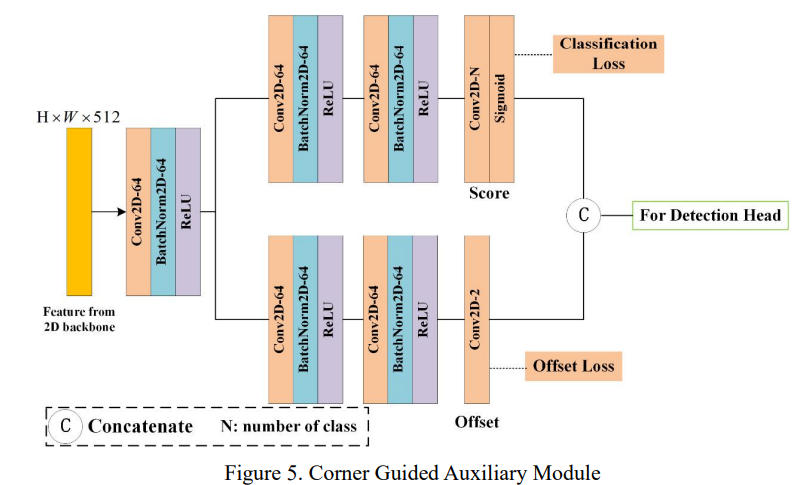
整个网络的结构如下
Experiment
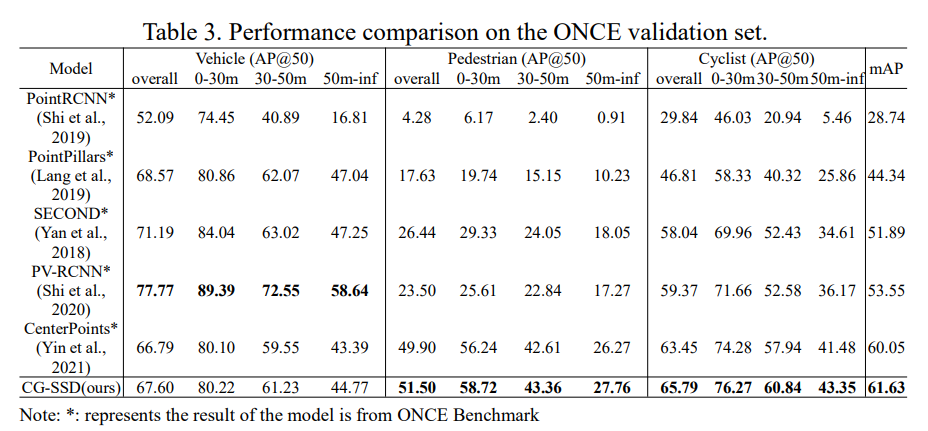
- ONCE 验证集的结果
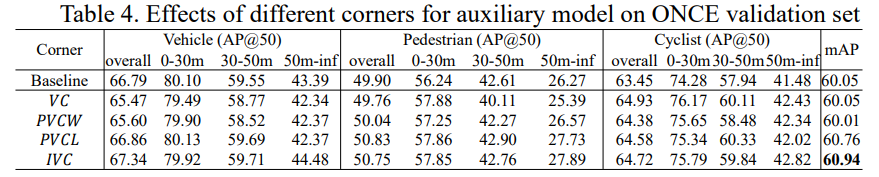
- 不同角对于表现的提升
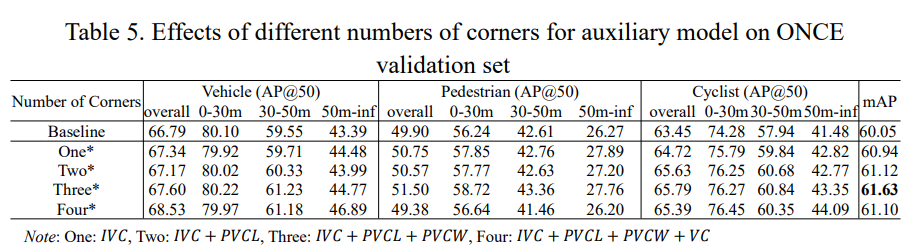
- 选取角对表现的提升
- 预测 offset 对于模型的提升

- CGAM 作为辅助模块

思考
为什么自己的结构不起作用?之后设计结构需要注意哪些地方?


