PV-RCNN
Shi, Shaoshuai, Chaoxu Guo, Li Jiang, Zhe Wang, Jianping Shi, Xiaogang Wang, and Hongsheng Li. “PV-RCNN: Point-Voxel Feature Set Abstraction for 3D Object Detection.” ArXiv:1912.13192 [Cs, Eess], April 9, 2021. http://arxiv.org/abs/1912.13192.
Comment: Accepted by CVPR 2020. arXiv admin note: substantial text overlap with arXiv:2102.00463
Introduction
大多数现有的 3D 检测方法在点云表示方面可以分为两类:
- 基于体素化的表示,the grid-based methods (e.g. VoxelNet)
- 基于点的表示,the point-based methods (e.g. Point R-CNN)
这两种方法各有优缺点:
- 基于体素化的操作有效地编码多尺度特征 multi-scale feature representations,并可以生成高质量的 3D proposals
- 基于 PointNet 的 set abstraction 操作,保留了更准确的位置信息,并且可以有更加灵活的感受野
而 PV-RCNN 就是受这两类表示的启发,将这两类方法有效结合起来,使得点云特征既有体素化的多尺度信息,又增加了 set abstraction 的精准度与灵活度
论文总结了4个贡献点:
- 结合了两种点云表示的优点:基于体素的表示和基于点的表示
- 提出了 voxel-to-keypoint scene encoding scheme,将体素类的特征编码转化为点云类特征
提出了 multi-scale RoI feature abstraction layer,将 RoI 中的点云特征编码转化为栅格点特征 RoI-grid pooling via set abstraction
PV-RCNN 以显著的优势在当时的 KITTI & Waymo 榜单上排名第一
中间两点提得比较笼统,需要具体看看 PV-RCNN 的结构才能有一个形象的了解
PV-RCNN Architecture
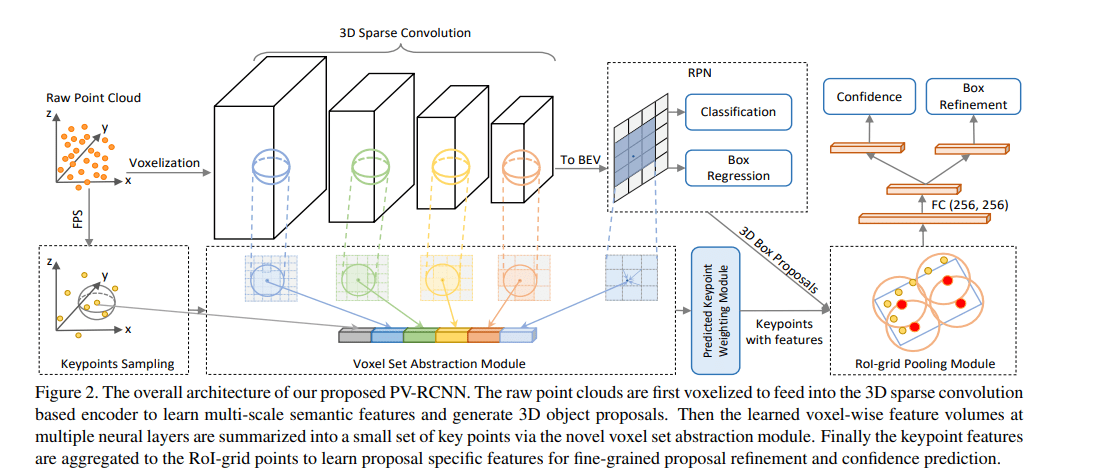
3D voxel CNN
首先将输入点云 P 划分为空间分辨率为 $L × W × H$ 的小体素/栅格,其中非空体素的特征直接计算为所有内部点的逐点特征的平均值。常用的特征是 3D 坐标 coordinate 和反射强度 reflectance intensity。Voxel CNN 能够在多个下采样分辨率下 (1x, 2x, 4x, 8x) 进行特征提取,得到不同 level 的 voxel-wise feature vectors,这就是体素化方法的好处,可以直接采用成熟的卷积方法
但是使用 voxel CNN 也会有一定的局限性:
- 这些特征通常为低分辨率的空间特征,损失了大量的空间信息,阻碍了对象的准确定位
- 即使通过上采样 upsample 这些特征图谱都会是比较稀疏的,传统的池化方法可能得到许多零特征向量
Proposal generation
将提取的 3D 特征转换 reshape 为 2D 俯视特征图 bird-view feature maps,按照基于锚 anchor 的方法生成高质量的 3D proposal (e.g. PointPillars)。这里可以尝试使用其他的生成算法,例如将 anchor-based 换为 anchor-free,提升效率和准确率
Voxel-to-keypoint encoding
了解了 voxel CNN 的一些局限性,是否有方法去补偿损失的空间信息呢?这里论文将提出一种全新的 encoding 方法 voxel set abstraction (VSA),来将整个场景的编码从 voxel-like 转换为 point-like,具体来说 voxel set abstraction 使用 PointNet++ 网络中的 set abstraction 思想,将 voxel 特征聚合到场景中的关键点集 $K$上,这些关键点由 FurthestPoint-Sampling (FPS) 算法采样得出。这一操作我认为是整个论文里最具创意的操作,将 set abstraction 的操作进行了更广的拓展,从原来的 point-to-point 特征聚合操作,到这里为 voxel-to-point。更详细的动机可以参考原作者在 知乎 上的回答
现在以更加数学化的语言来表达 voxel set abstraction (VSA)。关键点集合 $K=\{p_1,…,p_n\}$,对于每个关键点 $p_i$ ,我们在多个半径 $r_k$ 内寻找其相邻的非空体素 $v_j^{(l_k)}$ 其对特征为 $f_j^{(l_k)}$,$l_k$ 代表的是在 voxel CNN 阶段中的不同分辨率阶段
然后使用 PointNet++ 中的 set abstraction 操作,将这些特征聚合为一个特征向量
其中 $M(·)$ 表示从相邻集合 $S^{(l_k)}_i$ 中随机采样最多 $T_k$ 个体素以节省计算,$G(·)$ 表示一个多层感知器网络 MLP(区别于 PoinNet 中的 Shared MLP)。将多个半径的特征向量连接起来就能得到多尺度的特征,类似于 PointNet++ 中的 multi-scale grouping (MSG)
现在将不同分辨率的特征连接起来,原论文有4个不同的分辨率
再添加一些特征:原点云数据 raw point feature 和对应点的俯视图特征 bird-eye view feature,得到最终的整个点云的特征集合
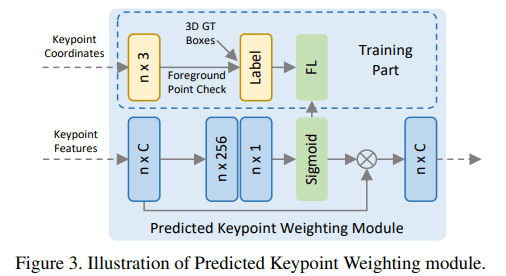
再进行一些权重调整,权重依据为该点是否为前景点,如果为背景点则权重降低,这将给模型带来更好的注意力机制。使用得到的点云特征,送入到三层的 MLP $A(·)$ 中去预测该点的权重,然后再与原特征相乘
这里的权重调整机制论文称为 predicted key weighting (PKW),其图示如下
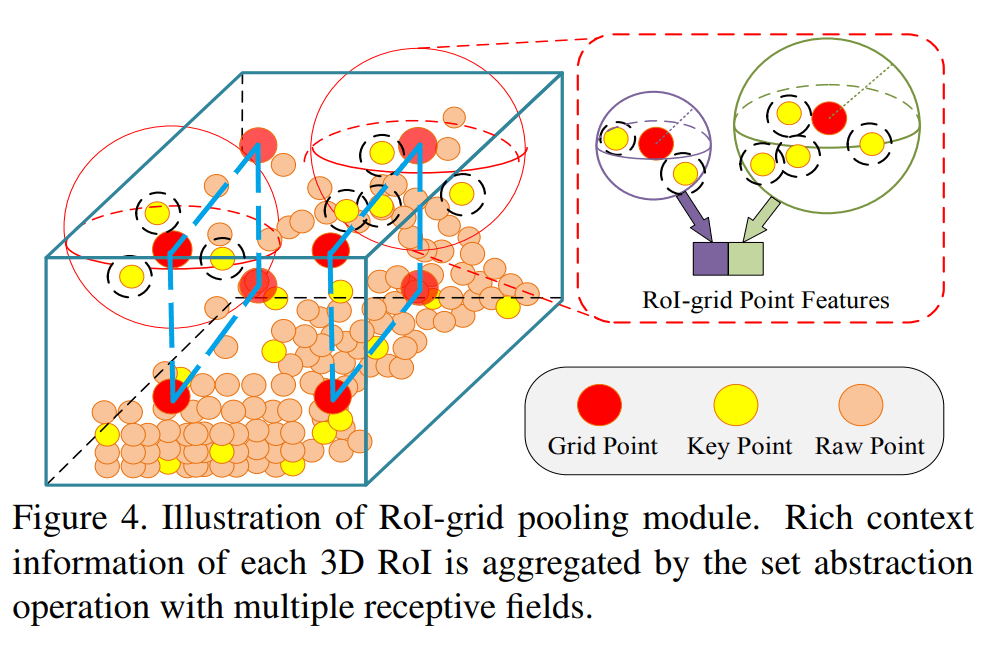
Keypoint-to-grid RoI feature abstraction
给定每个 3D RoI/proposal,论文提出 RoI-grid pooling,将关键点特征聚合到具有多个感受野的 RoI-grid 点,特征聚合方法依旧类似于 PointNet++ MSG,图示如下,蓝色虚线是我自己画的,方便体现出 grid
其数学表达也是类似的
为什么这里还要再次进行编码,而不是直接使用选框内的所有点进行聚合,得到一个全局的表达?一个重要原因是因为使用 roi pooling 能够将特征聚合到一个固定的形状,便于之后输入到 MLP。同时也可能是为了获得多尺度的特征
Refinement and confidence prediction
采用2层 MLP,去做置信度预测和选框细化两个任务。采用 3D RoI/proposal 与其对应的真实选框 ground truth 之间的 3D IoU 作为训练目标,并采用二元交叉熵损失函数
这种 quality-aware 置信度预测策略比传统分类标签实现了更好的性能(这种损失函数是否还能进一步改进呢?比如通过简单的平滑过渡操作,使得学习曲线更平缓)对于细化 refinement 的目标和损失函数论文没有完整列出,整体思想是预测其残差,并使用 smooth-L1 loss,具体请参考 SECOND, Part-A^2
在 voxel CNN 阶段,region proposal 和 classification 的损失函数也没有完整列出,如下
其中分类任务和分割任务都使用的是 focal loss
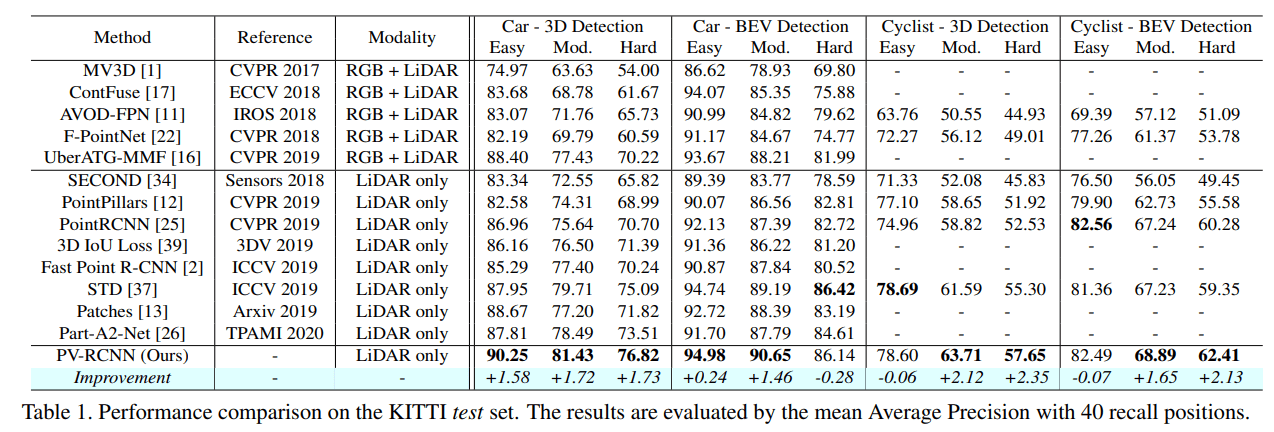
Experiment
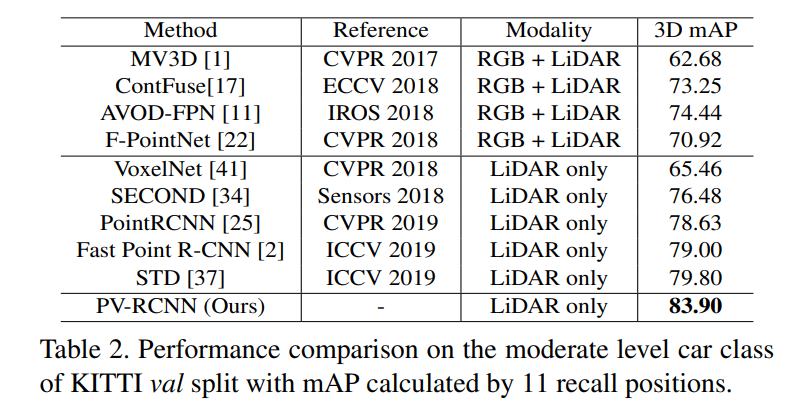
KITTI
PV-RCNN 在 KITTI 数据集上的准确率和召回率
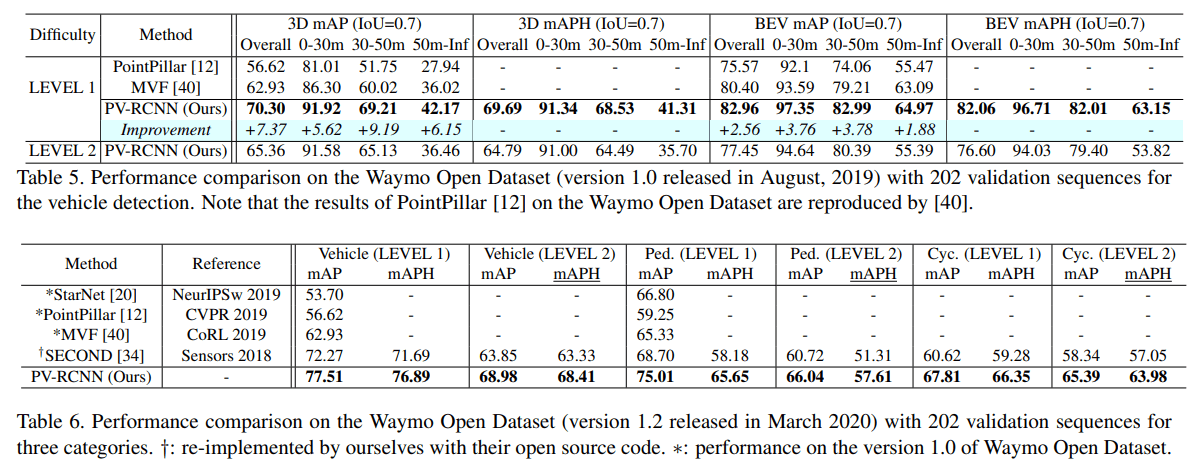
Waymo
Ablation study
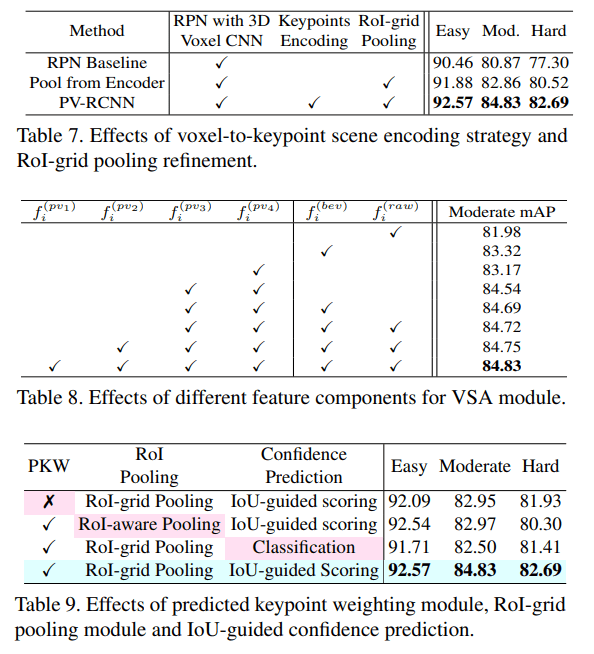
消融实验针对 voxel set abstraction, RoI-grid pooling, PKW, IoU-guided scoreing 进行深入研究,这些结构能将最终表现提升 1-3 mAP
Conclusion
PV-RCNN 中的一个巨大启发是对于特征的 aggregation 不需要被数据实际的形式给限制,结合多种数据提取特征的优势,创造其中的桥梁,能够更好地进行局部和全局的把控,又将点云表示带到了一个新的高度,即使接近两年过去了,该方法仍在 KITTI 榜单排名前50。该网络的推理速度在 80ms 左右,依旧还有提升的空间,项目开源在了 OpenMMLab,现在 OpenMMLab 又提出了新的网络 Voxel R-CNN,推理速度减少了一半,达到了 40ms 左右,而且准确度也上升了,可以进一步进行学习
TO READ
- SECOND
- Part-A^2
- Voxel R-CNN


