D2L 10 注意力机制
555终于可以开始看注意力机制了😆Transformer 我来啦!
注意力提示
生物学中的注意力提示
主要有两个概念:
- 非自主性提示/非随意线索(non-volitional cue),基于环境中物体的突出性和易见性
- 自主性提示/随意线索(volitional cue),受主观意愿推动
查询、键和值
教材对于这三个概念的解释并不清晰,还是看沐神的讲解吧 bilibili
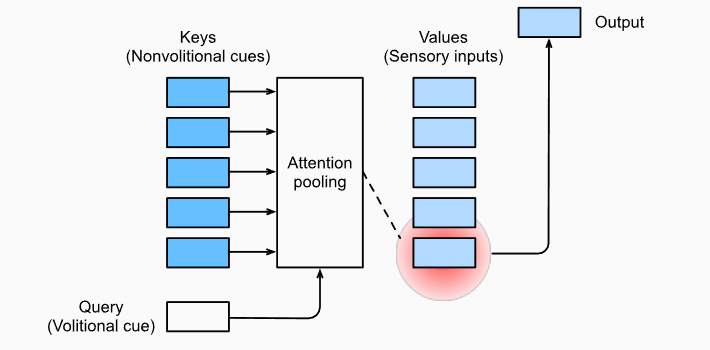
卷积、全连接、池化层都只考虑不随意线索,注意力机制则显式地考虑随意线索:
- 随意线索被称之为查询(query)
- 每个输入是一个键值对 (key, value),其中 key 可视为非随意线索,(下面这句是我自己乱想的)value 可以视为该线索的相关属性
- 通过注意力池化层来有偏向性的选择某些输入
非参数注意力汇聚:Nadaraya-Watson 核回归
实际上一个数学表达的例子能够更清楚展示这三个概念。给定数据 $(x_i, y_i), i=1,…,n$
给定查询 $x$,平均池化将获得输出
这就是没有注意力机制的情况,与查询值无关,全凭非随意线索获得输出。而更好的方案是60年代提出来的 Nadaraya-Waston 核回归
其中 K 可以看作一个核函数,例如一个高斯核,用于衡量两点之间的距离
这就将注意力机制显式地用于输出,也就是给各个 value 加入相关权重。现在再来看这个图示可能会更好
带参数注意力汇聚
非参数的Nadaraya-Watson核回归具有一致性(consistency)的优点:如果有足够的数据,此模型会收敛到最优结果。尽管如此,我们还是可以轻松地将可学习的参数集成到注意力汇聚中
注意这里 $w$ 只是一个标量,如果 $w$ 越大说明越注意近距离的键值。这里提一下,一个训练样本的输入都会和除自己以外的所有训练样本的“键-值”对进行计算,如果加入自己的 key 那么训练结果可想而知,就是给自己的 key 加入很大的权重
注意力可视化
平均池化可以被视为输入的加权平均值,只是权重相等。而注意力池化则是真正的加权平均,其中权重是在给定的查询 query 和不同的键 key 之间计算得出的。教材这里写了一些代码,在之后用于注意力可视化,以描绘图像 $weight = f(query, key)$ ,这里直接看看上一小节中的非参 N-W 核回归(左侧) & 带参 N-W 核回归(右侧)的图像
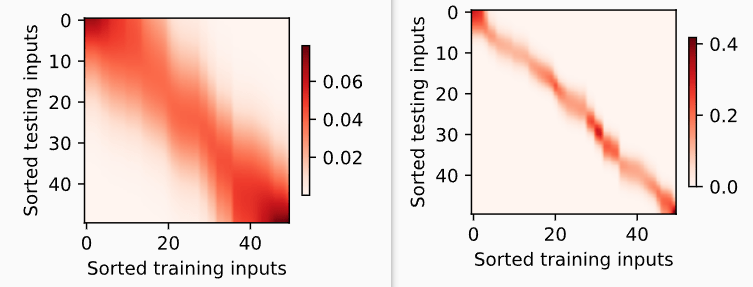
可以明显看到注意力权重在 $query = key$ 的时候加重了
注意力评分函数
我们可以将上一节中的高斯核指数部分视为注意力评分函数(attention scoring function),简称评分函数(scoring function),然后把这个函数的输出结果输入到 softmax 函数中进行运算(这样就能使评分以概率分布形式展现,换句话说就是使权重的和为一)
让 score function 表示更加数学化
此时注意力汇聚函数 $f$ 就被表示为
在本节中,我们将介绍两个流行的评分函数,稍后将用他们来实现更复杂的注意力机制
掩蔽 softmax 操作
在某些情况下,并非所有的值都应该被纳入到注意力汇聚中。例如,为了高效处理小批量数据集,某些文本序列被填充了没有意义的特殊词元。为了仅将有意义的词元作为值来获取注意力汇聚,我们可以指定一个有效序列长度,以便在计算softmax时过滤掉超出指定范围的位置。看看大概效果是什么样子
# (batch, num_query, num_key)
masked_softmax(torch.rand(2, 2, 4), torch.tensor([2, 3]))
tensor([[[0.4527, 0.5473, 0.0000, 0.0000],
[0.3458, 0.6542, 0.0000, 0.0000]],
[[0.4151, 0.3528, 0.2321, 0.0000],
[0.2604, 0.2631, 0.4765, 0.0000]]])加性注意力
当查询和键是不同长度的矢量时, 我们可以使用加性注意力(additive attention)作为评分函数
上代码,注意代码中对 query, key, value 的数量(sequence length / time step)具有一般性,它们的形状表示为 (batch_size, seq_len, feature),教材中使用的 query, key, value 具体形状为:(2, 1, 20),(2, 10, 2) 和 (2, 10, 4),具体走一遍会比较清晰
#@save
class AdditiveAttention(nn.Module):
"""加性注意力"""
def __init__(self, key_size, query_size, num_hiddens, dropout, **kwargs):
super(AdditiveAttention, self).__init__(**kwargs)
# 无偏置
# nn.Linear 的 input 为 (*,H_in) * 代表任意数量的维度,包括 none
self.W_k = nn.Linear(key_size, num_hiddens, bias=False)
self.W_q = nn.Linear(query_size, num_hiddens, bias=False)
self.w_v = nn.Linear(num_hiddens, 1, bias=False)
self.dropout = nn.Dropout(dropout)
def forward(self, queries, keys, values, valid_lens):
queries, keys = self.W_q(queries), self.W_k(keys)
# 在维度扩展后,
# queries的形状:(batch_size,查询的个数,1,num_hidden)
# key的形状:(batch_size,1,“键-值”对的个数,num_hiddens)
# 使用广播方式进行求和
features = queries.unsqueeze(2) + keys.unsqueeze(1)
features = torch.tanh(features)
# self.w_v仅有一个输出,因此从形状中移除最后那个维度。
# scores的形状:(batch_size,查询的个数,“键-值”对的个数)
scores = self.w_v(features).squeeze(-1)
self.attention_weights = masked_softmax(scores, valid_lens)
# values的形状:(batch_size,“键-值”对的个数,值的维度)
# 使用 batch matrix multiplication(@ 重载符既可以计算 mm 又可以计算 bmm)
# 使用 dropout 进行正则化
return torch.bmm(self.dropout(self.attention_weights), values)运行下面的代码
queries, keys = torch.normal(0, 1, (2, 1, 20)), torch.ones((2, 10, 2))
# values的小批量,两个值矩阵是相同的
values = torch.arange(40, dtype=torch.float32).reshape(1, 10, 4).repeat(
2, 1, 1)
valid_lens = torch.tensor([2, 6])
attention = AdditiveAttention(key_size=2, query_size=20, num_hiddens=8,
dropout=0.1)
attention.eval()
attention(queries, keys, values, valid_lens)结果如下
tensor([[[ 2.0000, 3.0000, 4.0000, 5.0000]],
[[10.0000, 11.0000, 12.0000, 13.0000]]], grad_fn=<BmmBackward0>)缩放点积注意力
使用点积可以得到计算效率更高的评分函数,但是点积操作要求查询和键具有相同的长度 d
假设查询和键的所有元素都是独立的随机变量, 并且都满足零均值和单位方差, 那么两个向量的点积的均值为0,方差为 d。为确保无论向量长度如何,点积的方差在不考虑向量长度的情况下仍然是1,我们将点积除以 $\sqrt d$
查询 $Q\in R^{n\times d}$,键 $K \in R^{m \times d}$ ,值 $V \in R^{m \times v}$ 的缩放点积注意力(scaled dot-product attention)是:
它的代码就相对简单一些
#@save
class DotProductAttention(nn.Module):
"""缩放点积注意力"""
def __init__(self, dropout, **kwargs):
super(DotProductAttention, self).__init__(**kwargs)
self.dropout = nn.Dropout(dropout)
# queries的形状:(batch_size,查询的个数,d)
# keys的形状:(batch_size,“键-值”对的个数,d)
# values的形状:(batch_size,“键-值”对的个数,值的维度)
# valid_lens的形状:(batch_size,)或者(batch_size,查询的个数)
def forward(self, queries, keys, values, valid_lens=None):
d = queries.shape[-1]
# 设置transpose_b=True为了交换keys的最后两个维度
scores = torch.bmm(queries, keys.transpose(1,2)) / math.sqrt(d)
self.attention_weights = masked_softmax(scores, valid_lens)
return torch.bmm(self.dropout(self.attention_weights), values)Bahdanau 注意力
之前教材讨论了机器翻译问题:通过编码器-解码器架构,用于序列到序列学习。具体来说,编码器将长度可变的序列转换为固定形状的上下文变量,然后解码器根据生成的词元和上下文变量按词元生成输出(目标)序列词元。然而,即使并非所有输入(源)词元都对解码某个词元都有用,但我们在每个解码步骤中仍使用编码相同的上下文变量
有什么方法能在不同解码步骤中,使用不同的上下文变量呢?这个时候 Bahdanau 注意力机制就登场了,下面具体来看看吧
模型
上下文变量任意解码时间步 $t’$ 会被替换为 $c_{t’}$
其中,$h_t$ 为编码器 t 时间步的隐状态,它即使 key 又是 value;$s_{t’-1}$ 为解码器 $t’-1$ 时刻步的隐状态;注意力权重 $\alpha$ 是之前定义的加性注意力打分函数。看一下模型代码
class Seq2SeqAttentionDecoder(AttentionDecoder):
def __init__(self, vocab_size, embed_size, num_hiddens, num_layers,
dropout=0, **kwargs):
super(Seq2SeqAttentionDecoder, self).__init__(**kwargs)
self.attention = d2l.AdditiveAttention(
num_hiddens, num_hiddens, num_hiddens, dropout)
self.embedding = nn.Embedding(vocab_size, embed_size)
self.rnn = nn.GRU(
embed_size + num_hiddens, num_hiddens, num_layers,
dropout=dropout)
self.dense = nn.Linear(num_hiddens, vocab_size)
def init_state(self, enc_outputs, enc_valid_lens, *args):
# outputs的形状为(batch_size,num_steps,num_hiddens).
# hidden_state的形状为(num_layers,batch_size,num_hiddens)
outputs, hidden_state = enc_outputs
return (outputs.permute(1, 0, 2), hidden_state, enc_valid_lens)
def forward(self, X, state):
# X.shape = (num_batch, num_steps) 存储词元的索引
# enc_outputs的形状为(batch_size,num_steps,num_hiddens).
# hidden_state的形状为(num_layers,batch_size,
# num_hiddens)
enc_outputs, hidden_state, enc_valid_lens = state
# 输出X的形状为(num_steps,batch_size,embed_size)
X = self.embedding(X).permute(1, 0, 2)
outputs, self._attention_weights = [], []
for x in X:
# query的形状为(batch_size,1,num_hiddens)
query = torch.unsqueeze(hidden_state[-1], dim=1)
# context的形状为(batch_size,1,num_hiddens)
context = self.attention(
query, enc_outputs, enc_outputs, enc_valid_lens)
# 在特征维度上连结
x = torch.cat((context, torch.unsqueeze(x, dim=1)), dim=-1)
# 将x变形为(1,batch_size,embed_size+num_hiddens)
out, hidden_state = self.rnn(x.permute(1, 0, 2), hidden_state)
outputs.append(out)
self._attention_weights.append(self.attention.attention_weights)
# 全连接层变换后,outputs的形状为
# (num_steps,batch_size,vocab_size)
outputs = self.dense(torch.cat(outputs, dim=0))
return outputs.permute(1, 0, 2), [enc_outputs, hidden_state,
enc_valid_lens]
@property
def attention_weights(self):
return self._attention_weights关于 nn.Embedding,其实在之前 seq2seq 中的代码也有使用,整理几个点:
- Embedding 层将每个词元转化为 embed_size 维度的向量(也称为词向量)
- Embedding layer 存储了一个参数矩阵 (vocab_size, embed_size) 是可以随着训练更新的
- 经过训练之后相似词元的词向量可能会变得更接近
来看看其中的权重是什么样子的吧,输入和输出分别为: i'm home . => je suis chez moi .
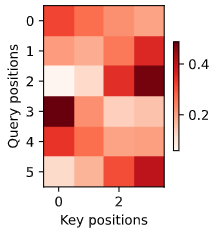
应该是加入了 <eos> 特殊词元,所以 (key positions, Query positions) = (3+1, 5+1)
多头注意力
多头注意力这一部分的视频讲解是在 Transformer 中进行的 bilibili
在实践中,当给定相同的查询、键和值的集合时, 我们希望模型可以基于相同的注意力机制学习到不同的行为,然后将不同的行为作为知识组合起来,捕获序列内各种范围的依赖关系(例如,短距离依赖和长距离依赖关系)
对于其中一个头 $i$ 的操作简述如下:是对 query, key, value 先使用全连接层进行维度转换,转换到一个相同的维度 $p_v$,然后再使用缩放点积注意力。每一个头都将进行这样的操作,假设有 $m$ 个头,那么就会得到 $m$ 个注意力汇聚输出 $h_i, i=1,…,m$,最后将所有的 $h_i$ 连接起来,使用一个全连接层进行特征组合得到最终的输出,数学形式如下:
这里 $W_0$ 是一个 $p_0 \times p_0$ 的矩阵,$p_0 = \text{number of heads} \times p_v$,图示如下
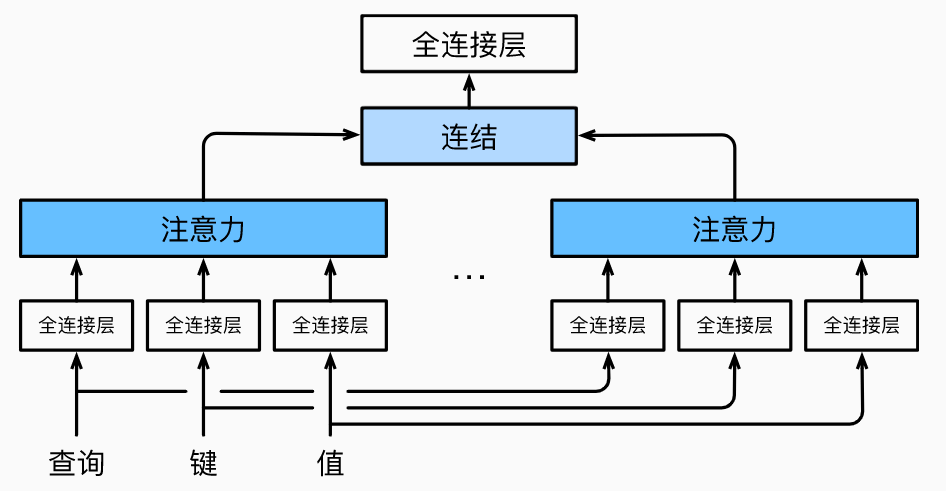
在使用代码实现的时候发现,可以把 num_heads 个 $W_{i}q$ 使用一个大的 $W_q$ 代替,然后将变换后的特征进行分割即可。其他两个矩阵同理,这样便于并行处理,并且代码更简洁
#@save
class MultiHeadAttention(nn.Module):
"""多头注意力"""
def __init__(self, key_size, query_size, value_size, num_hiddens,
num_heads, dropout, bias=False, **kwargs):
super(MultiHeadAttention, self).__init__(**kwargs)
self.num_heads = num_heads
self.attention = d2l.DotProductAttention(dropout)
self.W_q = nn.Linear(query_size, num_hiddens, bias=bias)
self.W_k = nn.Linear(key_size, num_hiddens, bias=bias)
self.W_v = nn.Linear(value_size, num_hiddens, bias=bias)
self.W_o = nn.Linear(num_hiddens, num_hiddens, bias=bias)
def forward(self, queries, keys, values, valid_lens):
queries = transpose_qkv(self.W_q(queries), self.num_heads)
keys = transpose_qkv(self.W_k(keys), self.num_heads)
values = transpose_qkv(self.W_v(values), self.num_heads)
if valid_lens is not None:
# 在轴0,将第一项(标量或者矢量)复制num_heads次
valid_lens = torch.repeat_interleave(
valid_lens, repeats=self.num_heads, dim=0)
# output的形状:(batch_size*num_heads,num_query,
# num_hiddens/num_heads)
output = self.attention(queries, keys, values, valid_lens)
output_concat = transpose_output(output, self.num_heads)
return self.W_o(output_concat)
#@save
def transpose_qkv(X, num_heads):
"""为了多注意力头的并行计算而变换形状"""
X = X.reshape(X.shape[0], X.shape[1], num_heads, -1)
X = X.permute(0, 2, 1, 3)
# 最终输出的形状:(batch_size*num_heads, num_query or num_keys,
# num_hiddens/num_heads)
return X.reshape(-1, X.shape[2], X.shape[3])
#@save
def transpose_output(X, num_heads):
"""逆转transpose_qkv函数的操作"""
X = X.reshape(-1, num_heads, X.shape[1], X.shape[2])
X = X.permute(0, 2, 1, 3)
return X.reshape(X.shape[0], X.shape[1], -1)自注意力和位置编码
终于进入自注意力部分了,离 transformer 只有一步之遥!
在深度学习中,我们经常使用卷积神经网络(CNN)或循环神经网络(RNN)对序列进行编码。想象一下,有了注意力机制之后,我们将词元序列输入注意力池化层中,同一组词元同时充当查询、键和值。每个查询都会关注所有的键-值对并生成一个注意力输出。由于查询、键和值来自同一组输入,因此被称为 自注意力(self-attention)在本节中,我们将使用自注意力进行序列编码,以及如何使用序列的顺序作为补充信息
自注意力
给定一个由词元组成的输入序列,其中任意 $x_i \in R^ d$。该序列的自注意力输出为一个长度相同的序列:
比较卷积神经网络、循环神经网络和自注意力
下图为三者计算的图示
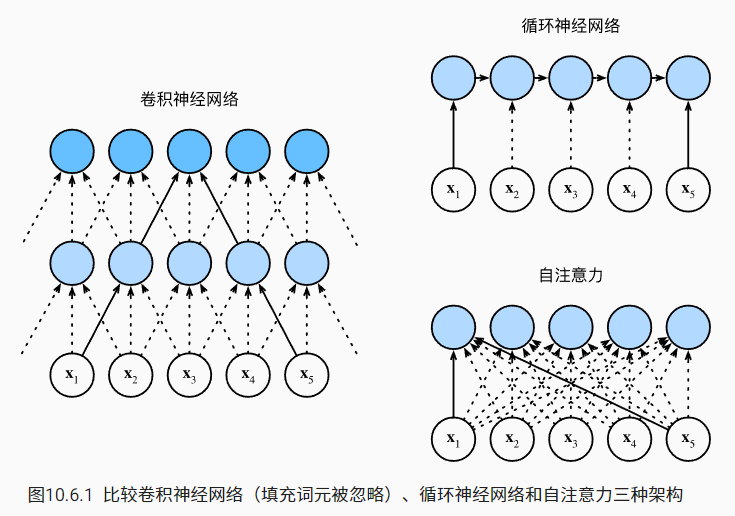
现在让我们比较这三个架构,目标都是将由 n 个词元组成的序列映射到另一个长度相等的序列,其中的每个输入词元或输出词元都由 d 维向量表示。具体来说,我们将比较的是卷积神经网络、循环神经网络和自注意力这几个架构的计算复杂性、顺序操作和最大路径长度。请注意,顺序操作会妨碍并行计算,而任意的序列位置组合之间的路径越短,则能更轻松地学习序列中的远距离依赖关系
下面这个表依然来自于沐神视频 bilibili,非常清晰地对比了三者的关系,其中 k 是一维卷积核的 kernel size
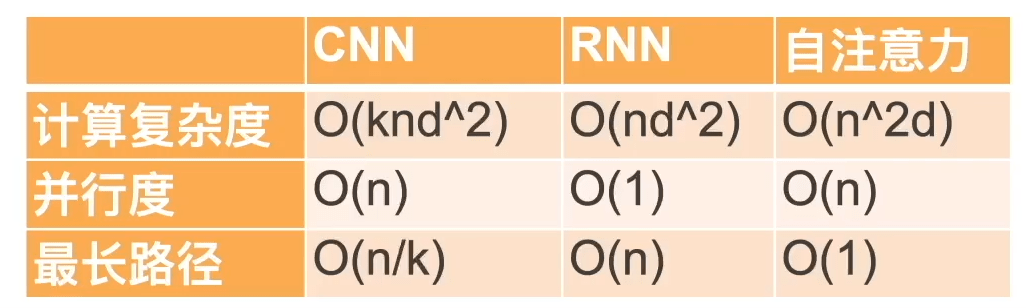
稍微解释一下:
- 最长路径中的路径为:两个词元进行信息传递的计算次数
- 循环神经网络的隐状态时, d×d 权重矩阵和 d 维隐状态的乘法计算复杂度为 $O(d^2)$
- 在自注意力中,查询、键和值都是 n×d 矩阵。 并且使用缩放点积注意力,故自注意力计算复杂度为 $O(n^2d)$,并且由于使用的是矩阵乘法,而矩阵乘法的并行度为 $O(n)$
总而言之,卷积神经网络和自注意力都拥有并行计算的优势,而且自注意力的最大路径长度最短。但是因为其计算复杂度是关于序列长度的二次方,所以在很长的序列中计算会非常慢
位置编码
不同于 CNN 和 RNN,以上得到的自注意力计算结果是不包含位置(顺序)信息的。也就是说换个输入顺序,得到的结果还是那些结果,这显然不是我们想要的,接下来,我们描述的是基于正弦函数和余弦函数的固定位置编码(不得不吐槽一下这个编码真的略微抽象
以下是我的个人理解:对于一个序列 range(n),我需要使用 d 个维度对其位置进行编码,采取如下编码形式, $p_{i,j}$ 即是第 i 个位置的第 j 个维度的编码数
第一次看这个编码真的太蒙圈了,不过教材举了一个例子:绝对位置信息。也就是我们使用 d 位二进制对序列 range(n) 的位置进行编码,这样来看是不是就简单不少了
# d = 5
0的二进制是:00000
1的二进制是:00001
2的二进制是:00010
3的二进制是:00011
4的二进制是:00100
5的二进制是:00101
6的二进制是:00110
7的二进制是:00111越高位的数字变化得越慢,一共能够编码 $2^n$ 个数。那如果我们用 d 维 (0, 1) 之间的数去对位置进行编码是不是也可以呢?教材中的位置编码就属于其中一种。还可以从平面空间的角度来进行理解,假设有 d 个维度,此时我们画出 d/2 个平面
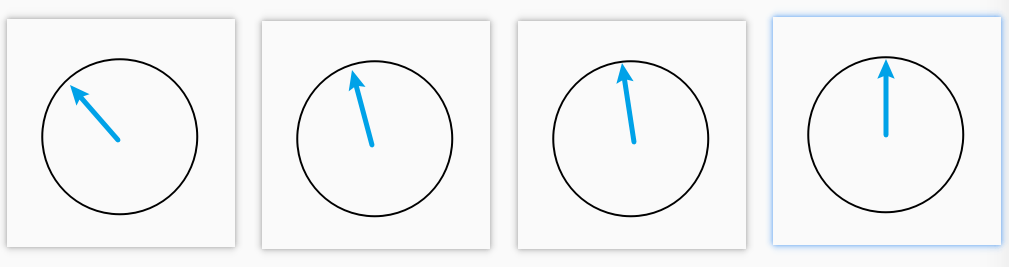
旋转角度就是对应着 (cos, sin),随着位数越高每次 i 进一时,旋转的幅度越小。下面是 position 和 endoding dimension 的热力图
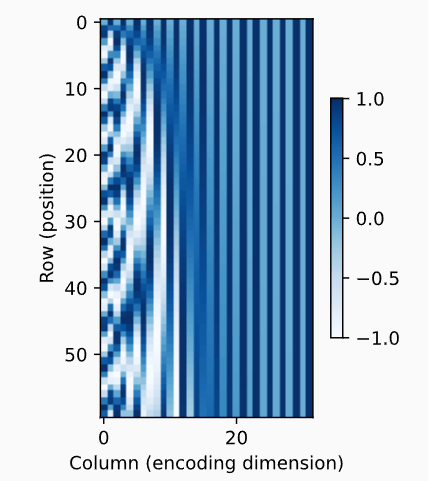
我已经尽力去理解了…但是还是有点云里雾里,不过还是先继续前行吧
Transformer
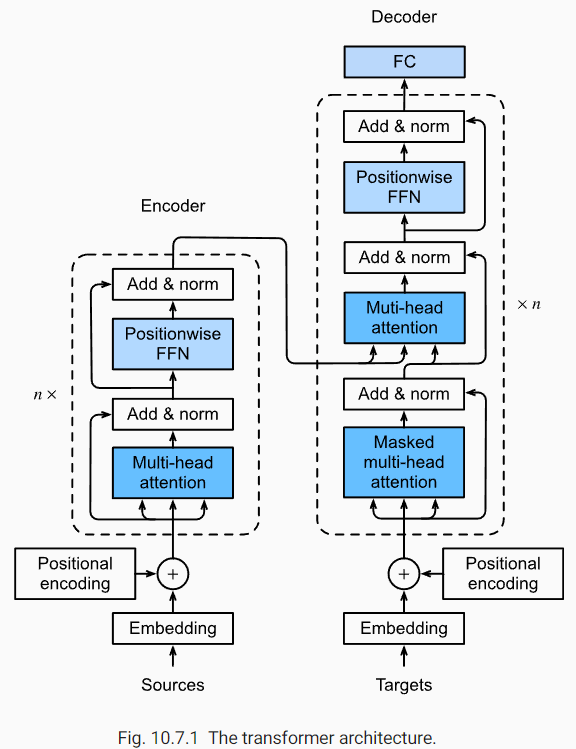
与 CNN 和 RNN 比较,自注意力同时具有并行计算和最短的最大路径长度这两个优势,因此,使用自注意力来设计深度架构是很有吸引力的。尽管 transformer 最初是应用于在文本数据上的序列到序列学习,但现在已经推广到各种现代的深度学习中,例如语言、视觉、语音和强化学习领域
我认为这里贴英文的图示比较好,第一次看这个图肯定是一头雾水,可以先看代码,了解每个模块的结构,然后再拼起来
基于位置的前馈网络 (Positionwise FFN)
名字很酷,实际上是两个全连接层
#@save
class PositionWiseFFN(nn.Module):
"""基于位置的前馈网络"""
def __init__(self, ffn_num_input, ffn_num_hiddens, ffn_num_outputs,
**kwargs):
super(PositionWiseFFN, self).__init__(**kwargs)
self.dense1 = nn.Linear(ffn_num_input, ffn_num_hiddens)
self.relu = nn.ReLU()
self.dense2 = nn.Linear(ffn_num_hiddens, ffn_num_outputs)
def forward(self, X):
return self.dense2(self.relu(self.dense1(X)))残差连接和层规范化(add & norm)
残差连接是很常见的网络结构,这里主要讲讲规范化使用的是 LayerNorm。假设数据 $X$ 的形状为 (batch, num_steps, channels),BatchNorm 针对的是 batch 维度,最后得到的均值和方差形状是 (num_steps, channels)
但问题来了,在计算机视觉中 num_steps 一般代表的是图片的形状 (H, W) 所以是一个固定的值,而在序列模型中,由于每个样本的时间步可能不一样
所以 LayerNorm 针对的是 num_steps 维度(更宽泛的讲可以是除了 batch 以外的其他维度),最终得到的均值和方差形状是 (batch, channels) or (batch,),这就保证了统一性,因为 batch & channel 一般是一个固定值。
除了使用 LayerNorm 还使用了 dropout 正则化,下面来看看核心代码(LayerNorm 输入是 normalized_shape,我理解为计算单个统计值,数据所需的形状)
#@save
class AddNorm(nn.Module):
"""残差连接后进行层规范化"""
def __init__(self, normalized_shape, dropout, **kwargs):
super(AddNorm, self).__init__(**kwargs)
self.dropout = nn.Dropout(dropout)
self.ln = nn.LayerNorm(normalized_shape)
def forward(self, X, Y):
return self.ln(self.dropout(Y) + X)编码器
EncoderBlock
有了以上两个模块:FFN & AddNorm,再加上之前介绍的多头注意力模块,就能够构建一个完整的 transformer 编码器模块
#@save
class EncoderBlock(nn.Module):
"""transformer编码器块"""
def __init__(self, key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens, num_heads,
dropout, use_bias=False, **kwargs):
super(EncoderBlock, self).__init__(**kwargs)
self.attention = d2l.MultiHeadAttention(
key_size, query_size, value_size, num_hiddens, num_heads, dropout,
use_bias)
self.addnorm1 = AddNorm(norm_shape, dropout)
self.ffn = PositionWiseFFN(
ffn_num_input, ffn_num_hiddens, num_hiddens)
self.addnorm2 = AddNorm(norm_shape, dropout)
def forward(self, X, valid_lens):
Y = self.addnorm1(X, self.attention(X, X, X, valid_lens))
return self.addnorm2(Y, self.ffn(Y))transformer 一个很好的性质是:编码器中的任何层都不会改变其输入的形状!
X = torch.ones((2, 100, 24))
valid_lens = torch.tensor([3, 2])
encoder_blk = EncoderBlock(24, 24, 24, 24, [100, 24], 24, 48, 8, 0.5)
encoder_blk.eval()
encoder_blk(X, valid_lens).shape
# torch.Size([2, 100, 24])TransformerEncoder
有了单个模块之后,就可以将它们堆叠起来获得更强大编码器,当然这里还有两个需要注意的点:
- Positional encoding,给每一个序列使用之前所将的三角函数位置编码
- 由于 embedding 的数值是经过归一化的,也就是说除以了 $\sqrt{d}$,而 Positional encoding 的值是 (-1, 1) 之间的三角函数,为了让两个数相加(加入位置信息),并且让二者的数值大小相差更小,则需要将 embedding 再乘以长度 $\sqrt{d}$ 以还原
代码如下
#@save
class TransformerEncoder(d2l.Encoder):
"""transformer编码器"""
def __init__(self, vocab_size, key_size, query_size, value_size,
num_hiddens, norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, num_layers, dropout, use_bias=False, **kwargs):
super(TransformerEncoder, self).__init__(**kwargs)
self.num_hiddens = num_hiddens
self.embedding = nn.Embedding(vocab_size, num_hiddens)
self.pos_encoding = d2l.PositionalEncoding(num_hiddens, dropout)
self.blks = nn.Sequential()
for i in range(num_layers):
self.blks.add_module("block"+str(i),
EncoderBlock(key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, dropout, use_bias))
def forward(self, X, valid_lens, *args):
# 因为位置编码值在-1和1之间,
# 因此嵌入值乘以嵌入维度的平方根进行缩放,
# 然后再与位置编码相加。
X = self.pos_encoding(self.embedding(X) * math.sqrt(self.num_hiddens))
self.attention_weights = [None] * len(self.blks)
for i, blk in enumerate(self.blks):
X = blk(X, valid_lens)
self.attention_weights[
i] = blk.attention.attention.attention_weights
return X下面我们指定了超参数来创建一个两层的 transformer 编码器。Transformer 编码器输出的形状是(批量大小,时间步数目,num_hiddens)
encoder = TransformerEncoder(
200, 24, 24, 24, 24, [100, 24], 24, 48, 8, 2, 0.5)
encoder.eval()
encoder(torch.ones((2, 100), dtype=torch.long), valid_lens).shape
# torch.Size([2, 100, 24])解码器
DecoderBlock
同样的,先实现单个解码器模块。其实基本的模块之前已经全部实现了,细节上的不同是:
- 与 encoder 相比,decoder 先使用自注意力汇聚对 targets 输入进行编码。然后将该编码作为 query、将 encoder 的输出作为 key & value,输入到多头注意力汇聚中
- 同 seq2seq 一样,在进行解码时不应该看到该时间步及其之后的信息,所以需要掩码
dec_valid_lens,以保持其自回归属性
具体代码如下
class DecoderBlock(nn.Module):
"""解码器中第 i 个块"""
def __init__(self, key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens, num_heads,
dropout, i, **kwargs):
super(DecoderBlock, self).__init__(**kwargs)
self.i = i
self.attention1 = d2l.MultiHeadAttention(
key_size, query_size, value_size, num_hiddens, num_heads, dropout)
self.addnorm1 = AddNorm(norm_shape, dropout)
self.attention2 = d2l.MultiHeadAttention(
key_size, query_size, value_size, num_hiddens, num_heads, dropout)
self.addnorm2 = AddNorm(norm_shape, dropout)
self.ffn = PositionWiseFFN(ffn_num_input, ffn_num_hiddens,
num_hiddens)
self.addnorm3 = AddNorm(norm_shape, dropout)
def forward(self, X, state):
enc_outputs, enc_valid_lens = state[0], state[1]
# 训练阶段,输出序列的所有词元都在同一时间处理,
# 因此 `state[2][self.i]` 初始化为 `None`。
# 预测阶段,输出序列是通过词元一个接着一个解码的,
# 因此 `state[2][self.i]` 包含着直到当前时间步第 `i` 个块解码的输出表示
if state[2][self.i] is None:
key_values = X
else:
key_values = torch.cat((state[2][self.i], X), axis=1)
state[2][self.i] = key_values
if self.training:
batch_size, num_steps, _ = X.shape
# `dec_valid_lens` 的开头: (`batch_size`, `num_steps`),
# 其中每一行是 [1, 2, ..., `num_steps`]
dec_valid_lens = torch.arange(
1, num_steps + 1, device=X.device).repeat(batch_size, 1)
else:
dec_valid_lens = None
# 自注意力
X2 = self.attention1(X, key_values, key_values, dec_valid_lens)
Y = self.addnorm1(X, X2)
# 编码器-解码器注意力。
# `enc_outputs` 的开头: (`batch_size`, `num_steps`, `num_hiddens`)
Y2 = self.attention2(Y, enc_outputs, enc_outputs, enc_valid_lens)
Z = self.addnorm2(Y, Y2)
return self.addnorm3(Z, self.ffn(Z)), state为了便于在“编码器-解码器”注意力中进行缩放点积计算和残差连接中进行加法计算,编码器和解码器的特征维度都是 num_hiddens,所以说 decoder 也是不改变数据形状的
decoder_blk = DecoderBlock(24, 24, 24, 24, [100, 24], 24, 48, 8, 0.5, 0)
decoder_blk.eval()
X = torch.ones((2, 100, 24))
state = [encoder_blk(X, valid_lens), valid_lens, [None]]
decoder_blk(X, state)[0].shape
# torch.Size([2, 100, 24])TransformerDecoder
下面将多个 decoder 组合起来,并保存注意力权重用于可视化
class TransformerDecoder(d2l.AttentionDecoder):
def __init__(self, vocab_size, key_size, query_size, value_size,
num_hiddens, norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, num_layers, dropout, **kwargs):
super(TransformerDecoder, self).__init__(**kwargs)
self.num_hiddens = num_hiddens
self.num_layers = num_layers
self.embedding = nn.Embedding(vocab_size, num_hiddens)
self.pos_encoding = d2l.PositionalEncoding(num_hiddens, dropout)
self.blks = nn.Sequential()
for i in range(num_layers):
self.blks.add_module("block"+str(i),
DecoderBlock(key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, dropout, i))
self.dense = nn.Linear(num_hiddens, vocab_size)
def init_state(self, enc_outputs, enc_valid_lens, *args):
return [enc_outputs, enc_valid_lens, [None] * self.num_layers]
def forward(self, X, state):
X = self.pos_encoding(self.embedding(X) * math.sqrt(self.num_hiddens))
self._attention_weights = [[None] * len(self.blks) for _ in range (2)]
for i, blk in enumerate(self.blks):
X, state = blk(X, state)
# 解码器自注意力权重
self._attention_weights[0][
i] = blk.attention1.attention.attention_weights
# “编码器-解码器”自注意力权重
self._attention_weights[1][
i] = blk.attention2.attention.attention_weights
return self.dense(X), state
@property
def attention_weights(self):
return self._attention_weights下面来看看三个 Multi-attention 的可视化结果,主要是体会 valid_len 的效果
Encoder self-attention weights
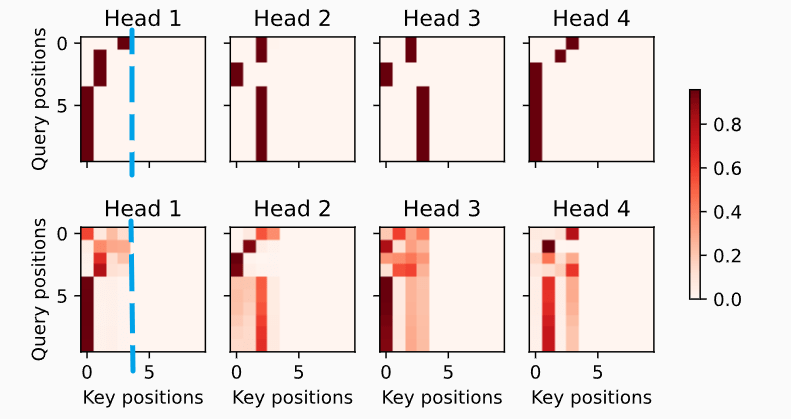
可以看到在某个 key positions 过后是没有注意力权重的,是因为之后的 key 都是
词元,不需要进行注意力计算 Decoder self-attention weights
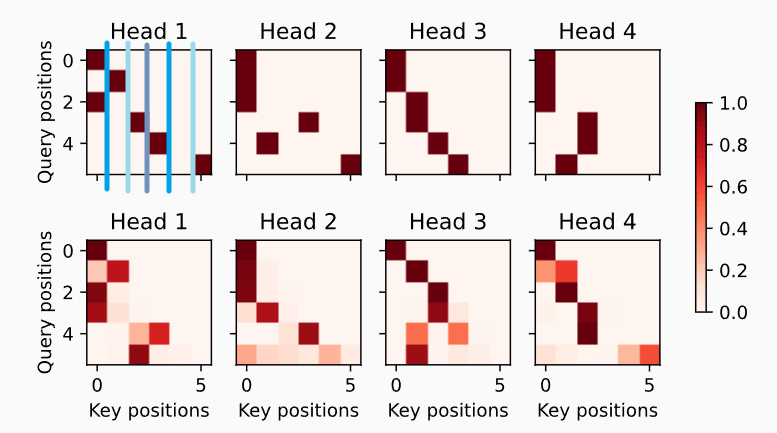
由于 decoder 的每个 valid_len 是随着时间步逐渐增加的,所以可以看到 self-attention weights 似乎整体是呈下三角形状
Encoder-decoder attention weights
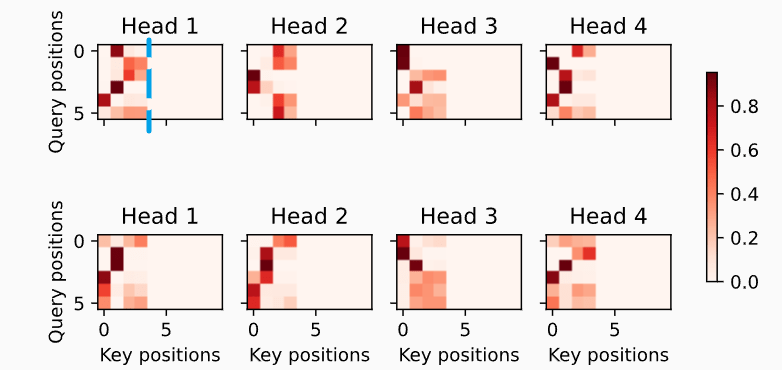
又出现了 encoder self-attention 中的情况,超过某个 key position 就没有权重了,因为只有这么多个 key (source time step)
感言
可算是完成了总结😭😭虽然看得还是比较粗糙,但是总归是有些概念了。在沐神读论文的视频 bilibili 中讲到:虽然 transformer 论文叫做 Attention Is All You Need,但事实上各个结构都是很重要的,例如:残差连接和层规规范化在训练深度网络时是非常重要的。Transformer (attention) 整体来看仍是一个发展初期的架构,在未来或许有更多的架构出现,一起期待吧


