PointRCNN
Shi, Shaoshuai, Xiaogang Wang, and Hongsheng Li. “PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud.” ArXiv:1812.04244 [Cs], May 16, 2019. http://arxiv.org/abs/1812.04244.
Comment: Accepted by CVPR 2019
今后的论文整理应该遵循一个统一的框架:
- 前言:主要为了提出问题,引入背景,引出论文。描述一下文章解决了什么问题,以及其重要亮点 Remark
- 结构:描述论文中的网络结构,及其核心思想
- 实验:论文的结果好坏
- 总结:写一些自己的想法,提出可能的方向
Introduction
PointRCNN 的一大特点是,该方法基于原始的点云数据直接进行特征提取和 RPN 操作。随着 PointNet 系列论文的出现,可以直接基于点云原始数据进行特征提取,而不需要进行体素化 (VoxelNet,SECOND) 或者对点云进行投影 (PointPillar) 再使用二维的一些方法。直接使用点云数据,最明显的好处就是减少了信息丢失 information loss
但在其他的文章当中,可以看到使用二维的处理方法并不是完全被排斥的 (CenterPoint)。因为 3D 选框有7维 $(x, y, z, w, h, l, \theta)$,最后一个维度代表的是角度,理论上来讲三维中物体的角度应该是有3个分量的,而这里仅有某一个平面(俯视)的角度,这里角度维度的确实本身就为二维方法提供了很好的入口
PointRCNN 提出的贡献:
- 提出了 3D 选框生成算法,a bottom-up point cloud-based 3D bounding box proposal generation algorithm
- 提出了 bin-based losses,提升网络表现与收敛速度
- 使用规范变换 Canonical transformation
后两个贡献似乎在指向两个方向:网络更倾向由易到难的学习,网络更擅于学习规范化的数据
PointRCNN Architecture
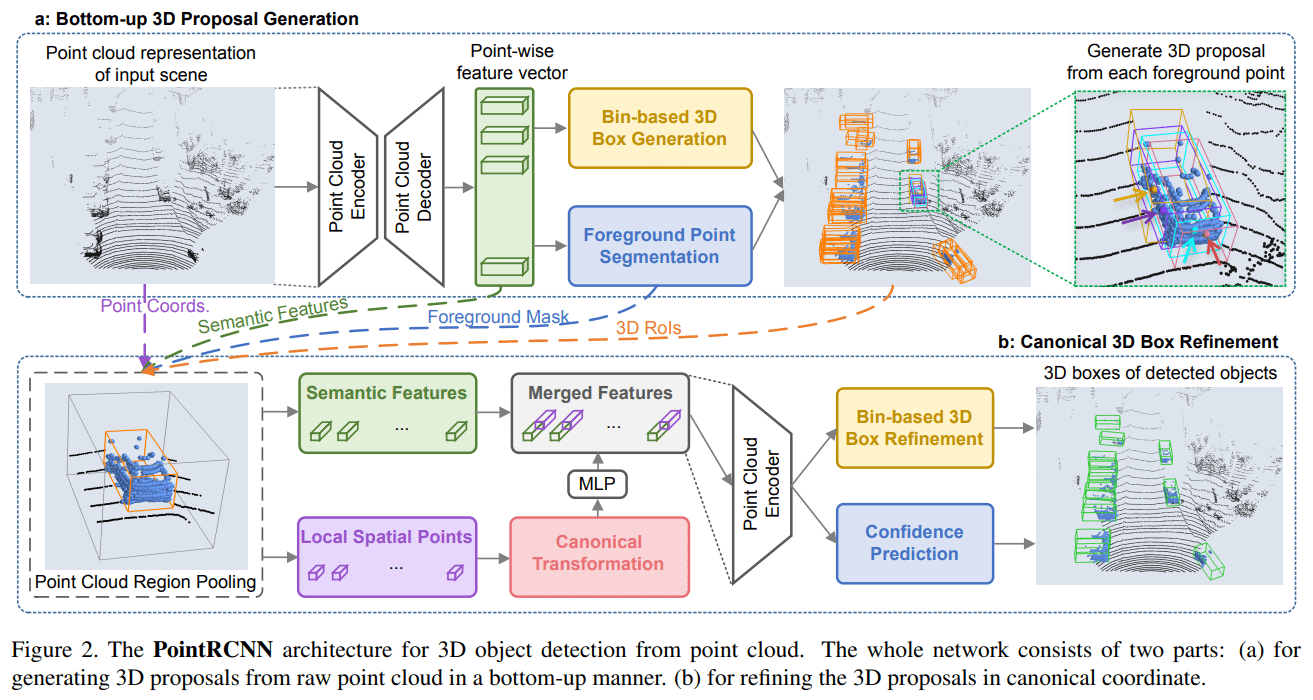
PointRCNN 的学习分为两个阶段:
3D 选框生成 proposal generation,使用 PointNet++ 提取每一个点的特征向量,使用这些向量预测前景点和背景点,并生成初步选框
3D 选框细化 box refinement,利用初步提取的选框,再对这些选框进行精细化处理
Stage-1: 3D 选框生成
前景点和背景点分割
论文使用 PointNet++ with multi-scale grouping 作为 backbone,提取每一个点的特征向量,每个点的特征向量是具有一定的感受野的,也就是包含了局部范围的信息。当然这个 backbone 也可以换成其他网络结构,可能效果会更好
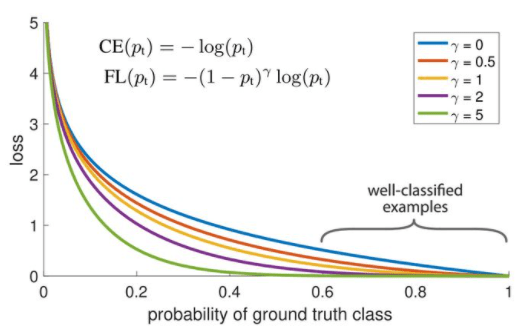
现在获得了逐点的特征向量 point-wise feature vector,先使用这些特征向量做前景点和背景点的分类任务,其损失函数为 focal loss
可以看到在 γ 比较大时,大部分的loss值都是比较低的,除非网络的预测非常的离谱,惩罚才会急剧增加。可以说 focal loss 能够减轻惩罚,把 loss 的权重 focus 在比较难的样本上
更详细的说明,知乎
选框生成
经过了前景点和背景点的二元分类任务,网络就要正式进行选框生成。需要注意的是,网络仅采用前景点来生成选框,尽管在网络训练之初,前景点和背景点的分类结果并不靠谱,但随着训练的深入会越来越准确
怎样通过前景点生成选框呢?一个简单的想法就是:每一个点都去回归预测该点所属的选框。论文在某些目标上采取了回归的思想,在一些重要目标上采用了分类+回归的预测方法,论文称这种思想为 bin-based。现在来看看在这一阶段网络想要预测的目标是什么,
结合下面这张图来解释一下其中的变量
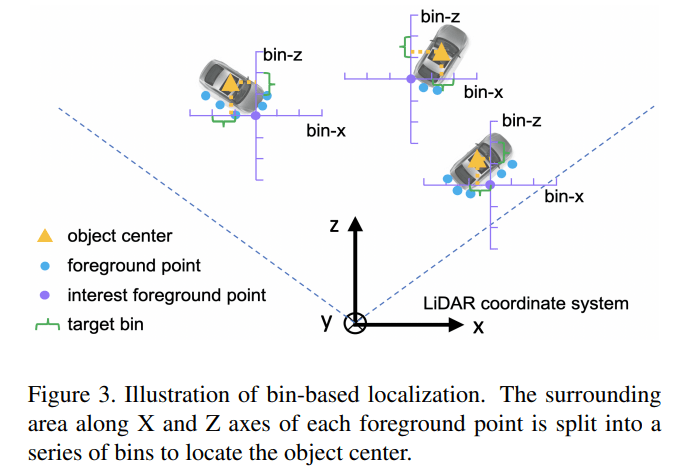
$(x^{(p)}, y^{(p)}, z^{(p)})$ 代表的是前景点的坐标,$(x^{p}, y^{p}, z^{p})$ 代表的是目标中心点的坐标,其余量均为常量,如 S 为搜索范围,δ 为 bin 的长度,C 为归一化常量。在文章并没有明确指出,如果超出了搜索范围是否就不使用该点进行预测,所以不太理解这里搜索范围的意义
现在可以具体来看目标的含义,首先是 $(bin_x^{(p)}, bin_z^{(p)})$ 可以将其看作中心点相对于前景点的栅格坐标。然后是残差,对于 x, z 坐标计算了栅格坐标和实际坐标的残差,对于 y 坐标则直接计算中心点相对于前景点的差距
想要得到的选框有7个变量 $(x, y, z, w, h, l, \theta)$,上面仅提到了3个,剩余的四个中,角度 θ 采取和 x, z 类似的思路使用 bin-based 思想,将角度分为多个区域;而选框的长款高则采取和 y 类似的思路,直接预测其残差,其残差为该标签与整个数据集的平均值的差
如果得到了以上预测值:bin, res,那么通过简单的计算,就能够得到预测选框的所有参数。设置这样的预测目标意义在哪里呢?以下为个人理解:
- 使用 bin-based 思想,将回归问题转化为分类问题,先去预测中心点落在哪个栅格中,然后再通过残差精细调整
- 使用残差,预测一个相对值是更容易的,预测一个绝对值需要更多的计算。从物理的角度上来说,就好像规定了一个零势能面,让计算变得有标准
有了目标标签和网络预测的结果,就需要损失函数来衡量结果的好坏
分类任务采取的是 cross entropy classification loss,回归任务采取的是 smooth L1 loss
NMS
使用 non-maximum suppression (NMS) 算法去除多余的选框,关于训练和推理时的具体参数请参考原文。筛选出来的选框,将进行下一步细化,NMS 几乎是筛选最终选框/细化选框必不可缺的,可能之后的总结里不会提,但不代表没有这一步骤
For training, we use 0.85 as the bird’s view IoU threshold and after NMS we keep top 300 proposals for training the stage-2 sub-network. For inference, we use oriented NMS with IoU threshold 0.8, and only top 100 proposals are kept for the refinement of stage-2 sub-network.
关于 NMS 的参考链接:link
Stage2: 3D 选框细化
选框细化 refinement 有4个主要步骤:
增大选框 region pooling,稍微将初步得到的选框扩大一点,使得该选框包含更多的前景点,同时剔除选框中的背景点。这对 Stage-1 的分割任务有一定要求
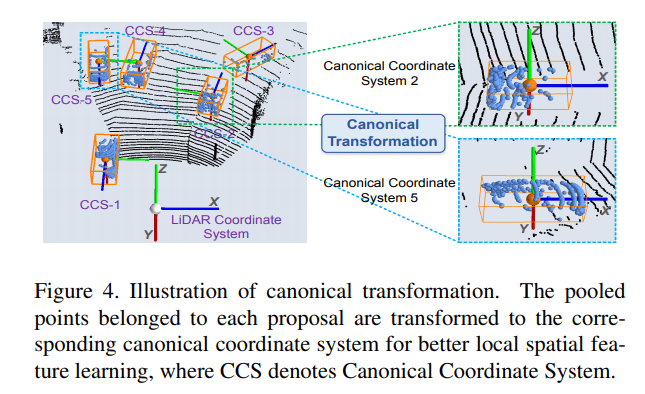
规范变换 canonical transformation,对每个选框建立了一个以自己为中心的个体坐标系,如下图所示
特征学习 feature learning
细化与分类 refinement & classification
现在对特征学习和重新细化进行详细地了解
特征学习
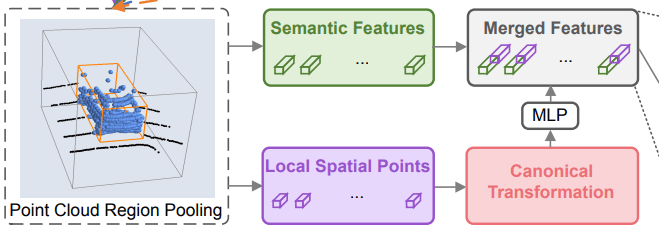
由于经过了规范变换丢失了深度信息,为每一个点加上人为构造的深度特征
每个点除了深度特征外,还增加了反射强度特征 r 和分割面罩 m。将这些规范变换并且增强后的特征,送入到一个 MLP 中进行转换得到一个输出,将该输出与 PointNet++ 中学习的语义特征连接起来,进行最后的细化工作
细化与分类
这里的学习过程和 Stage-1 中的学习过程是相似的。预测目标依然使用是 bin-based 思想,不过是在规范变化后的坐标下进行,而且仅对在 Stage-1 产生的基础选框内的点进行计算。其具体预测目标值就不再赘述,论文里给出了规范变化后的 ground truth bounding box 如何计算
其中没有 gt 上标的值即为对应基础选框的参数。除了对选框进行进一步的精细化外,还要执行多分类任务,该多分类任务的网络论文并没有详细说明,应该可以参照 PointNet 系列。Region pooling 的方法是在选框中的点里随机采样512个,便于之后输入 MLP
最终将精细化任务和多分类任务的损失函数相加,得到最终的损失函数
其中 positive bounding box 定义为如下
For training the box classification head, a proposal is considered as positive if its maximum 3D IoU with ground-truth boxes is above 0.6
在测试\推理时为了选出最终得分最高的选框,还要再使用一次 NMS 算法
We finally apply oriented NMS with bird’s view IoU threshold 0.01 to remove the overlapping bounding boxes
Experiment
需要注意的是 PointRCNN 两个阶段是分开训练的,而不是一个端到端的训练。分开训练和端对端训练有什么优势吗?
KITTI
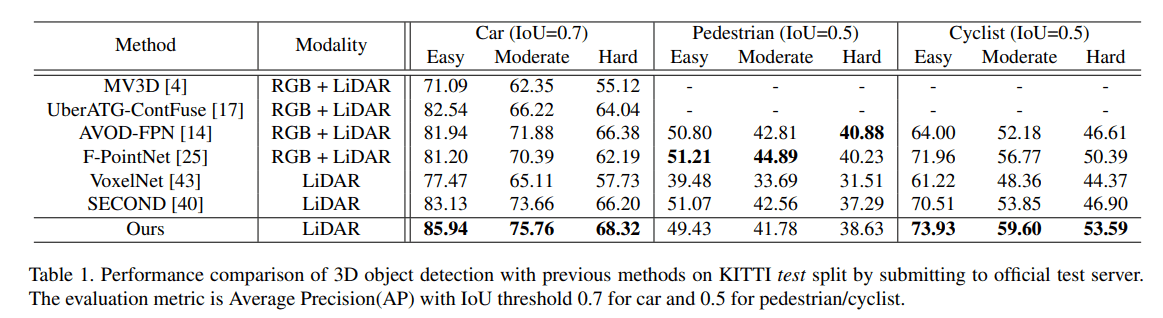
关于 average precision (AP) 和 recall 参考链接:知乎
Ablation study
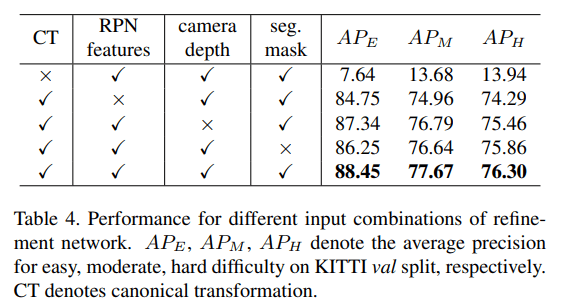
可以看到规范变换的作用非常大,大得离谱
Bin-based loss recall
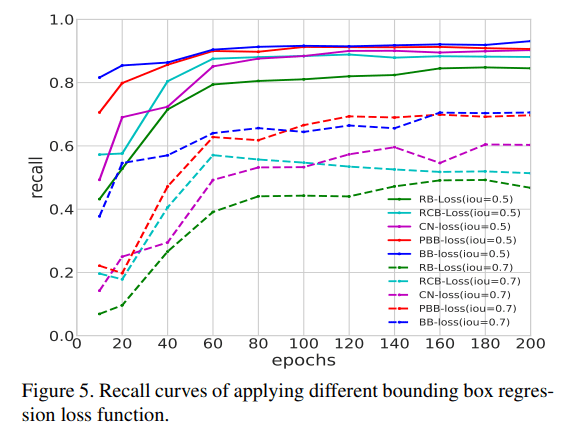
蓝色曲线为论文中使用的损失函数,效果最好
Conclusion
PointRCNN 为 2-Stage 网络,提出的 bin-based 损失函数和规范变换 canonical transformation 提升了网络的性能。并且直接使用点云数据,减少了原始点云的信息损失。但是整体看下来感觉 trick 和细节挺多的,比如其 region pooling 和前景背景点分割等等,论文里并没有记录其推理速度,在其他文献中找到大约为 10 fps,或许今后需要在速度上进行更快的突破
TO READ
LiDAR R-CNN


