Docker
很早之间就听说 docker 了,最近在 bilibili 上还看到了这么一个视频:为什么我不用 Docker? 着实把我笑拉了。而且在看 MMDetection3D 的时候发现可以通过 docker 安装,那么就尝试一下这个工具吧!也许又打开了新世界大门呢?更多关于科普的知识可以看这篇 知乎,这里引用其中一句话
docker是一个用Go语言实现的开源项目,可以让我们方便的创建和使用容器,docker将程序以及程序所有的依赖都打包到docker container,这样你的程序可以在任何环境都会有一致的表现,这里程序运行的依赖也就是容器就好比集装箱,容器所处的操作系统环境就好比货船或港口,程序的表现只和集装箱有关系(容器),和集装箱放在哪个货船或者哪个港口(操作系统)没有关系。
整个笔记参考 狂神说 Docker,打算整理一些基本逻辑和命令,方便之后复习与查看
Link: Docker Cheat Sheet
安装 Docker
这一步就不多说了,直接上 官网 下载,也可以根据上面提到的视频教程进行下载。如果下载很慢的话依旧考虑镜像安装,这里贴一个自家镜像关于 docker 的帮助文档:NJU Mirror,同时官方也提供了卸载 docker 的操作,可以放心下载了!现在我是在 windows 上熟悉 docker 操作,直接傻瓜式下载了 docker desktop,其中 Windows 安装可能遇到报错 WSL 2 installation is incomplete,根据提示下载 WLS_update_x64.msi 安装即可
Docker 基本组成
镜像(image)
When running a container, it uses an isolated filesystem. This custom filesystem is provided by a container image. Since the image contains the container’s filesystem, it must contain everything needed to run an application - all dependencies, configuration, scripts, binaries, etc. The image also contains other configuration for the container, such as environment variables, a default command to run, and other metadata.
容器(container)
A container is a sandboxed process on your machine that is isolated from all other processes on the host machine.
一种形象的说法时,镜像是类 class,容器是类的实例 object
仓库(repository)
就像 github 一样,仓库 dockerhub 可以存放各种开源镜像以供大家下载,如果下载 dockerhub 的速度慢,依然可以使用国内镜像源进行下载,NJU Mirror
Docker 的常用命令
Basic
docker version # 查看版本信息
docker info # 显示 docker 的系统信息,包括镜像和容器的数量
docker [command] --helpImage
# 查看镜像
docker images # 查看 images
docker images -aq # 查看所有 images id.
# a for all, q for quiet
# 搜索镜像
docker search img_name # 搜索镜像
docker search -f # filter
# 下载镜像
docker pull name:tag # 下载镜像,可以指定标签/版本
# 删除镜像
docker rmi img_name # 移除镜像
docker rmi -f img_name # 强制删除镜像
docker rmi -f $(docker images -aq) # 强制删除全部镜像
docker image prune -a # 清理没有使用的镜像
# 给镜像打标签
docker tag src_img dst_img:tag # 创造新的镜像及新标签Container
有了镜像 image 过后才能创建容器 container,这一部分的命令是最核心的也是最多的
# 创建容器
docker run [opt] img
# 常用参数
--name string # 给容器命名
-d, --detached # 后台运行
-it # 交互终端 interactive terminal
-p host_port:ctn_port # 指定暴露端口
--rm # 退出后删除容器
--hostname name # 指定主机名
# 查看容器
docker ps # 查看运行中的容器
docker ps -a # 查看所有容器
docker ps -q # 查看运行中的容器id
docker ps -n int # 限制显示数量
docker logs --tail 10 ctn_id # 查看容器操作日志
docker top ctn_id # 查看容器进程
docker inspect ctn_id # 查看容器元数据
# 退出容器
exit # 完全退出
ctrl + P + Q # 容器在后台仍运行
# 启动和停止容器
docker start ctn_id
docker start -ai ctn_id # 启动并进入容器交互
docker restart ctn_id
docker stop ctn_id
docker kill ctn_id # 强制停止
# 进入运行中的容器
docker exec -it ctn_id # 进入容器并开启新终端
docker attach ctn_id # 进入正在执行的终端
# 删除容器
docker rm ctn_id # 删除指定容器
docker rm -f $(docker ps -aq) # 强制删除所有容器
# 拷贝容器文件至主机
docker cp ctn_id:src_path dst_path # 之后使用卷技术 -v 可以实现文件共享以上的 ctn_id 指的时容器 id,也可以用容器名替代,如果有的话
补充:自己担心下载的镜像太多了会占用 C 盘,所以使用目录连接,将 docker appdata 移到了 D 盘
# 管理员权限
mklink /j Docker D:\AppData\Docker
mklink /j target sourceDocker 镜像讲解
镜像加载原理
UnionFS 是一种分层、轻量级并且高性能的文件系统。支持对文件系统的修改作为一次提交来一层层的叠加,同时可以将不同目录挂载到同一个虚拟文件系统下。在这种层级结构下,如果有涉及到相同的文件,那么层与层间就可以共用了,极大节省资源
docker 的镜像实际上由一层一层的文件系统组成,这种层级文件系统就是上述的 UnionFS。接着,在内部又分为2部分:
- boot file system (bootfs):docker镜像的最底层是bootfs,主要包含 bootloader(加载器)和 kernel(内核)。bootloader 主要是引导加载 kernel。注意 kernel 是与宿主机共享的,而且不用像虚拟机一样模拟硬件,所以 docker 加载很快,是秒级的
- root file system (rootfs):包含典型的目录结构,包括 /dev, /proc, /bin, /etc, /lib, /usr, and /tmp 等再加上要运行用户应用所需要的所有配置文件,二进制文件和库文件。这个文件系统在不同的Linux 发行版(Ubuntu, CentOS…)中是不同的。而且用户可以对这个文件进行修改,对比之下,用户就不会修改 bootfs
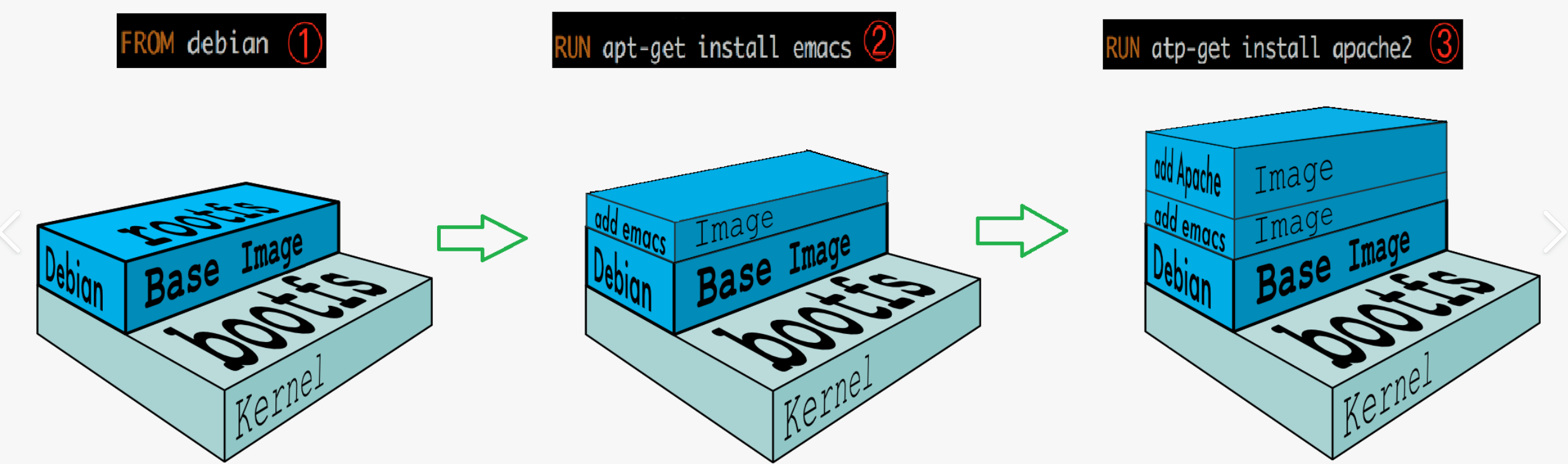
Docker 镜像都是只读的,当启动容器时,一个新的可写层被加载到镜像的顶部,这一层就是通常说的容器层,容器之下的都叫镜像层
Commit image
当你在容器中完成了你的应用,想要将该容器生成镜像,就可以使用 docker commit 命令。本质上就是把你的容器层变为镜像层,加入到原来的镜像层中(root file system)再打包保存起来。因为是分层文件管理系统,所以这样的操作很方便
docker commit -a "author" -m "message" ctn_id img_name:tag这样就可以打造自己的个性化镜像了,但之后还会有更高级的方法 Dockerfile 来创造镜像
Save & load image
有时候不希望从网络下载镜像,可以使用 docker save 命令打包镜像,然后把镜像传输给需要的人,别人再用 docker load 将镜像加载即可
docker save -o xxx.tar img
docker save -i xxx.tar 容器数据卷
这是一种将数据持久化/共享数据的技术。数据卷可以将容器与宿主机,容器与容器之间连接一个通道,进行数据共享,可同步修改。并且删掉其中一个容器的数据(不是修改),其他容器的共享数据并不会损坏,这就达到了持久化的效果
使用数据卷
# 在创建容器时通过参数 -v 挂载
-v, --volume=[host-src:]container-dest[:<options>]
# The 'host-src' is an absolute path or a name value.
# 通过多次 -v 参数挂载多个卷
# 指定路径挂载
# 如果不存在路径则自动创造
docker run -v host_dir:ctn_dir ctn_id
# 匿名挂载
# 仅传入容器内路径
docker run -v ctn_dir ctn_id
# 具名挂载
# 给卷添加名字,注意这区别于指定路径挂载
docker run -v name:ctn_dir ctn_id
# 指定读写权限,如 ro 指容器只能读卷
docker run -v ctn_dir:ro ctn_id
docekr run -v ctn_dir:rw ctn_id
# 容器之间的共享卷
# 可以其他容器的卷挂载到当前容器下
docker run --volumes-from ctn_list ctn_id
# 查看所有卷的情况
docker volume ls
docker volume inspect volume_id”挂载“的本质是在宿主机创造了一个数据卷 volume(如果实现没有该 volume 的话),可以把这个卷看作为一个共享文件夹,通过指定命令大家都可以来访问和修改
数据卷还可以使用 docker inspect ctn_id 查看详情,在 Mount 字段下记录有 Source & Destination 分别对应宿主机和容器内目录
除了通过 -v 命令挂载卷之外,还可以使用 Dockerfile 进行挂载,通过指定 VOLUME 字段,确定容器内挂载路径
VOLUME ["DIR_1","DIR_2",...]以上的操作都是在创建容器时挂载卷,如果在创建好容器之后想要挂载卷应该怎么办呢?事实上也没有一个优雅的办法能解决,可以选择将该容器 commit 为镜像,然后再进行创建
Dockerfile
在上一节首次提到了使用 dockerfile 挂载卷。Dockerfile 是用来构建 docker 镜像的文件,本质为一个命令参数脚本。先来看看一些官方的 dockerfile 是怎么写的😀
FROM scratch
ADD ubuntu-focal-oci-amd64-root.tar.gz /
# 假设该压缩文件已经预先下载到后面指定的目录
CMD ["bash"]这三行就创建了一个 Ubuntu 20.04 dockerfile,一般官方所给的都是最基础的,很多功能都没有,所以有时候需要自己创建 dockerfile 以及对应的镜像。简单介绍一下基础知识:
- 所有命令都是大写
- 命令按照顺序从上到下执行
- 注释使用井号 #
- 每个命令都会形成一个新的镜像层
Dockerfile 命令
Dockerfile 的常用命令及其作用
- FROM:基于哪个基础镜像
- WORKDIR:指定shell命令运行在哪个目录下。为后续的 RUN、CMD、COPY、ADD 等命令配置工作目录。接下来的 COPY 和 ADD 命令中的相对路径就是相对于 WORKDIR 指定的路径
- COPY:将当前宿主机的文件拷贝到镜像中去(copy的文件必须在build命令最后指定的路径内)
- ADD:和COPY一样,并且还可以解压缩,或者从 url 拷贝文件到镜像中。COPY 和 ADD 命令具有相同的特点:只复制目录中的内容而不包含目录自身。
- RUN:构建镜像时运行的shell命令
- CMD:容器运行时执行的shell命令(多个CMD只有最后一个生效,要想都执行可以使用&&连接多个命令)(如果容器run时,后面指定了shell版本,Dockerfile中的CMD也会被覆盖)
- ENTRYPOINT:和CMD一样,但是可以追加(必须使用exec格式,即:ENTRYPOINT [./entrypoint.sh,参数1,参数2……])
- EXPOSE:指定镜像暴露出来的端口
- VOLUMU:数据容器卷,指定映射文件,用于数据持久化
- ENV:指定环境变量
- LABEL:指定容器运行时标示
- SHELL:指定shell
- MAINTAINER:镜像维护者的姓名和邮箱地址
- ONBUILD:当构建一个父镜像时,父镜像被子镜像继承时,ONBUILD被触发
这里贴一个 mmdetection 3D 写的 dockerfile
ARG PYTORCH="1.6.0"
ARG CUDA="10.1"
ARG CUDNN="7"
FROM pytorch/pytorch:${PYTORCH}-cuda${CUDA}-cudnn${CUDNN}-devel
# 如果预先没有下载该镜像,猜测会自动装,类似 docker run
ENV TORCH_CUDA_ARCH_LIST="6.0 6.1 7.0+PTX"
ENV TORCH_NVCC_FLAGS="-Xfatbin -compress-all"
ENV CMAKE_PREFIX_PATH="$(dirname $(which conda))/../"
RUN apt-get update && apt-get install -y ffmpeg libsm6 libxext6 git ninja-build libglib2.0-0 libsm6 libxrender-dev libxext6 \
&& apt-get clean \
&& rm -rf /var/lib/apt/lists/*
# Install MMCV, MMDetection and MMSegmentation
RUN pip install mmcv-full==1.3.8 -f https://download.openmmlab.com/mmcv/dist/cu101/torch1.6.0/index.html
RUN pip install mmdet==2.17.0
RUN pip install mmsegmentation==0.18.0
# Install MMDetection3D
RUN conda clean --all
RUN git clone https://github.com/open-mmlab/mmdetection3d.git /mmdetection3d
WORKDIR /mmdetection3d
ENV FORCE_CUDA="1"
RUN pip install -r requirements/build.txt
RUN pip install --no-cache-dir -e .使用 dockerfile 生成镜像的常用命令
docker build -t name:tag -f dockerfile_name FILE_PATH发布镜像
DockerHub
注册 dockerhub 账户
登录,直接输入
docker login就会提示进程,也可以带参数docker login -u username # Password: docker logout # 退出登录发布镜像
docker push img:tag
也可以选择国内仓库进行发布,例如阿里云,这里不过多介绍了
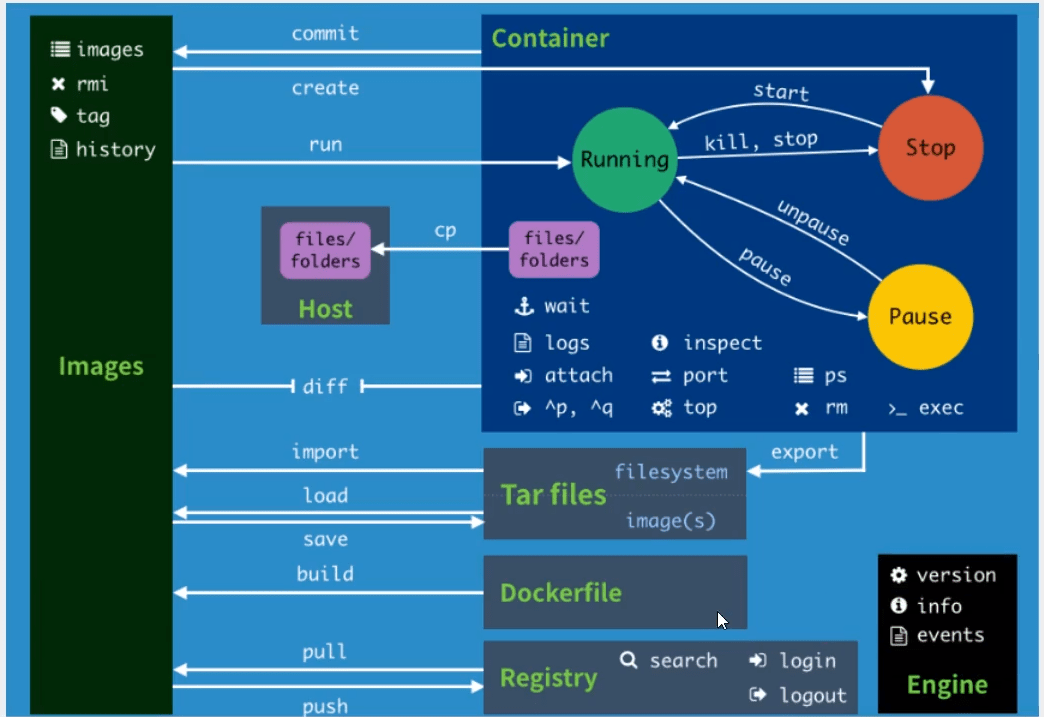
以图片小结 Docker